IRSF(南アフリカ望遠鏡)に関する技術を紹介します
この望遠鏡は、2000年11月15日眼視によるファーストライト、11月28日赤外線観測装置SIRIUSによるファーストライト成功により完成しました。
最新更新:2006年2月20日、背景の写真と、全体のレイアウトを調整しました。
この望遠鏡のは、11月15日に現地での開所式において、眼視によるファーストライトを行い、NGC104球状星団、いくつかの惑星、タランチュラ星雲など、迫力のある素晴らしい星像を見ることができました。
11月28日夜には専用の赤外線観測装置「SIRIUS」によって、J,H,Ksの三つの波長帯域でのファーストライトに成功、名実ともに「完成」といえる状況になりました。
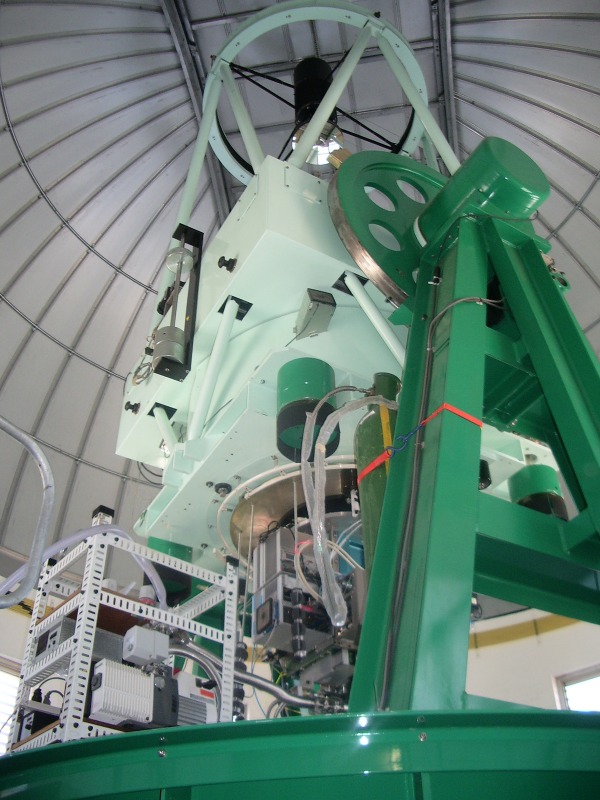
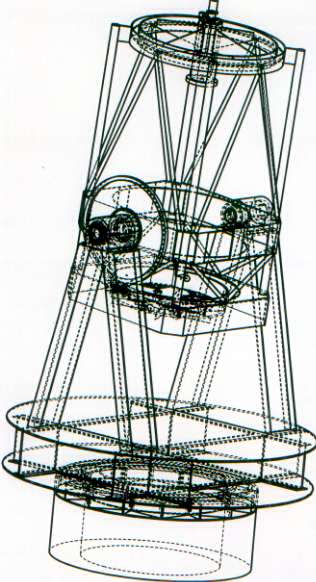
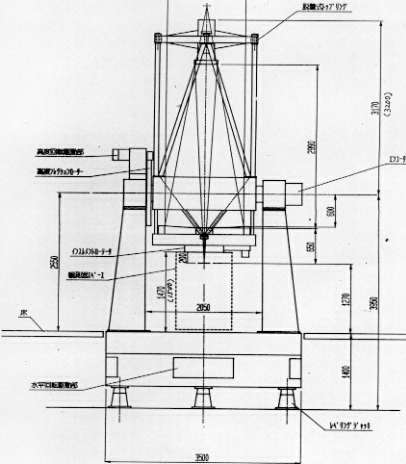
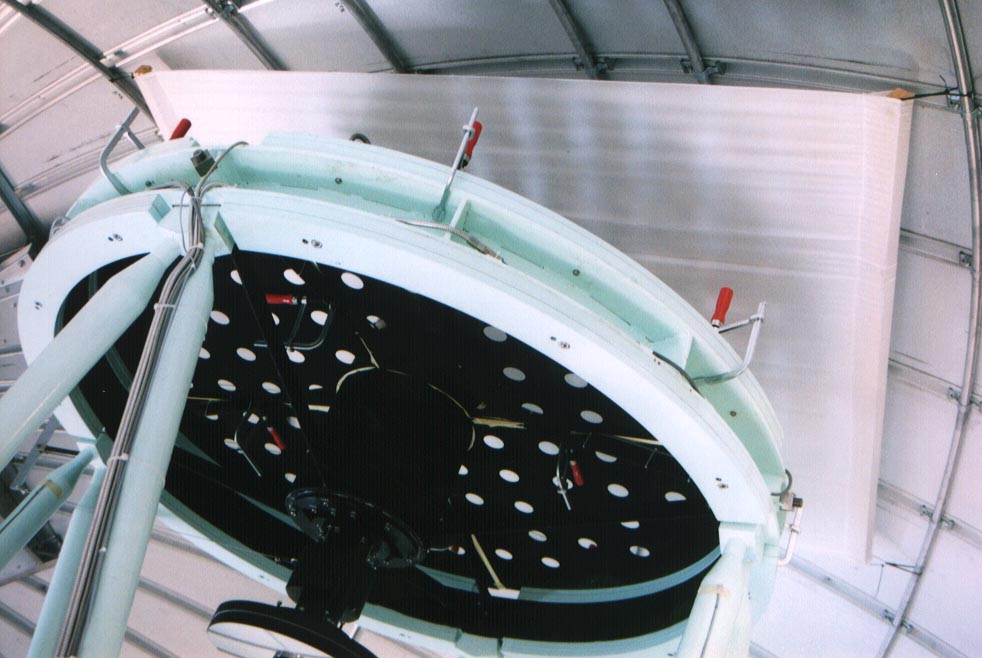
南アフリカ望遠鏡は赤外線を専門に観測するために、特別の工夫をしています。それは、光の望遠鏡と比較して、主鏡の直径に対して鏡筒の直径を大きくとり、熱い構造物(赤外線で見ると常温の物質は明るく輝いて見える)が観測装置から見えないようにすることです。このほかにも、天体望遠鏡についての最新の知見と、新しい技術を盛り込んだ結果、これまでの試験では良い結果が得られています。
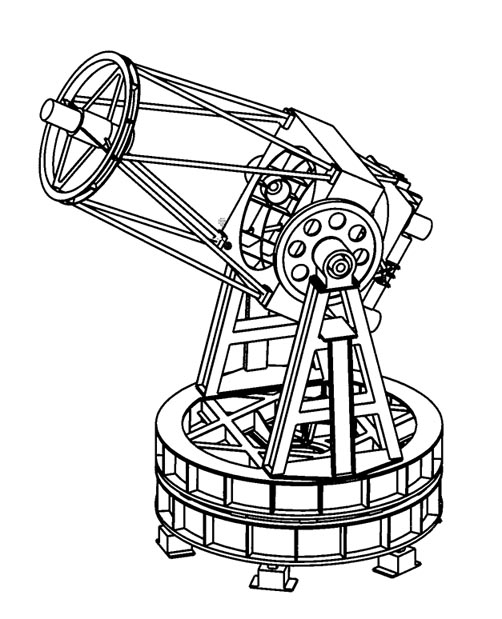
南アフリカ望遠鏡は主鏡1.4mF3、副鏡0.4m合成F10のクラシカルカセグレン光学系で、カセグレン焦点に観測装置(SIRIUS、赤外線のJ,H,K 3つの波長帯域を同時に撮像)を取り付けます。架台は経緯台です。経緯台は赤道儀に比較してドームを小さくできます。
名古屋大学Z研及び西村製作所のメンバーは9月9日より現地にて望遠鏡の再組み立て及び調整を行ない、機械的な組み立ては10月13日終了しました。この時点での精度はRMS17秒(修正なし)、恒星による修正を繰り返す中で4秒を達成しています。その後の調整や補正で、15分間追尾精度0.5秒、星導入精度2~3秒を達成しています。
この望遠鏡は、今後、主にマゼラン星雲を中心とする南の空にある天体を観測します。主力観測装置「SIRIUS」との総合的な制御の調整や修正などを行ないながら、12月から本格的な観測に入ります。
これまで、様々な形でご協力くださいました皆様に、お礼申し上げます。
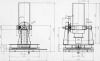
| 開所式(2000年11月) | 望遠鏡の全景 | 基本設計図 | サザーランドでの組立作業 |
 |
 |
 |
 |
関連サイト
南アフリカ望遠鏡(日本での作業情報のまとめ)
公開:2000年9月5日
南アフリカ望遠鏡は8月26日無事ケープタウンに到着しました。名古屋大学4名(Z研3名及び金工室の河合)と西村製作所3名の総勢7名で、現地組み立て作業を行ないます。
現地の組立て作業はあとでまとめて公開する予定です。
開所式は11月15日を予定しています。
調整の最終段階に入った南アフリカ望遠鏡
公開:6月27日、更新7月14日
南アフリカ望遠鏡は当初の仕様に対し、満足できる性能を確認できました。長い時間かかった制御に関する問題もほぼ解決し、ようやく、望遠鏡としての水準を満たす完成度を得ることができました。
フォークの振動は駆動速度とモータドライバのゲインで折り合いがつかず、苦しみましたが、高速と低速でゲインを切り替えるという手法を実施したところ、満足できる状態になりました。それまで貼り付けていた制振板もすべて取り払いました。これまでは運転中なにがしかの音が出ていましたが、ようやく静寂を保つようになり、一同満足しています。
これまでの性能試験では、データのある望遠鏡(国内)では最高水準の結果を出しています。日本における星像の限界があるので、星の追尾精度やハルトマンテストのついての基本的な性能評価は南アフリカにて詰めることになります。日本での性能試験では見えてこなかった問題点をさらに調整することにより、さらなる性能向上もおおいに期待できます。
今後は、7月26日出港の船に積み込むべく、最後の仕上げを行ない、解体梱包作業は7月初旬からとなります。
現在、解体、梱包作業はほぼ終了し、7月26日向け送り出しの最終段階になっています。8月末にケープタウン到着。9月初めよりサザーランドにて組立て・再調整、というというスケジュールで進んでいます。
現地での開所式(11月15日予定)を目指し、検出器(SIRIUS)を9月末~10月始めに望遠鏡に取り付け、総合的な調整・試験観測に入ることを目標に、最後の奮闘ということになりました。
南アフリカ望遠鏡の性能評価については、加藤レポートを参照して下さい。
望遠鏡性能評価レポート(PDFファイル、381KB )
以下に、現在の「南アフリカ望遠鏡」の到達点(2000年5月27現在)を公開します。
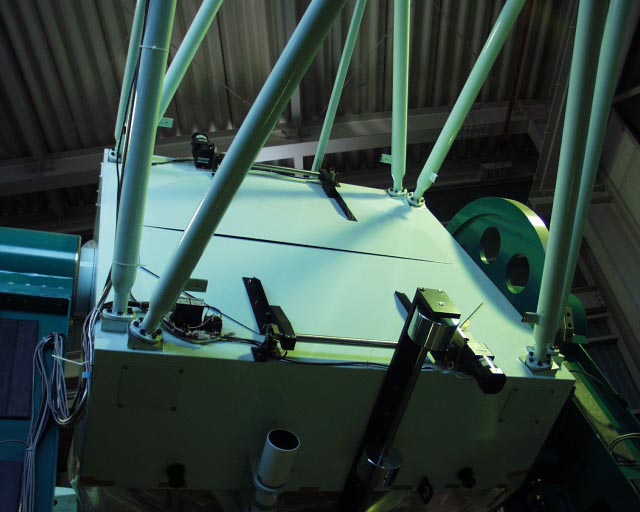
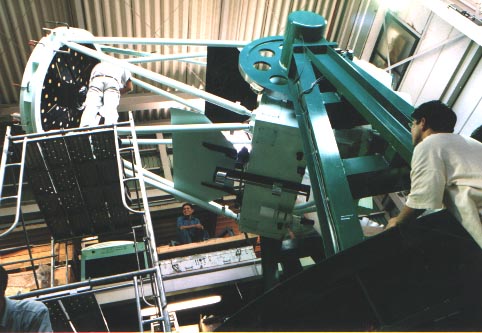
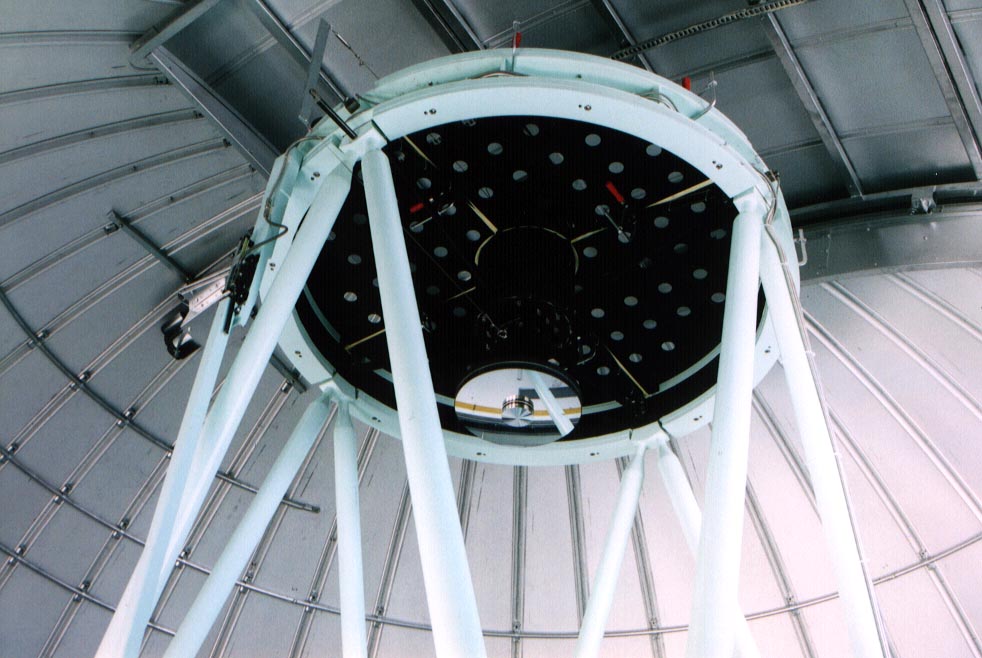
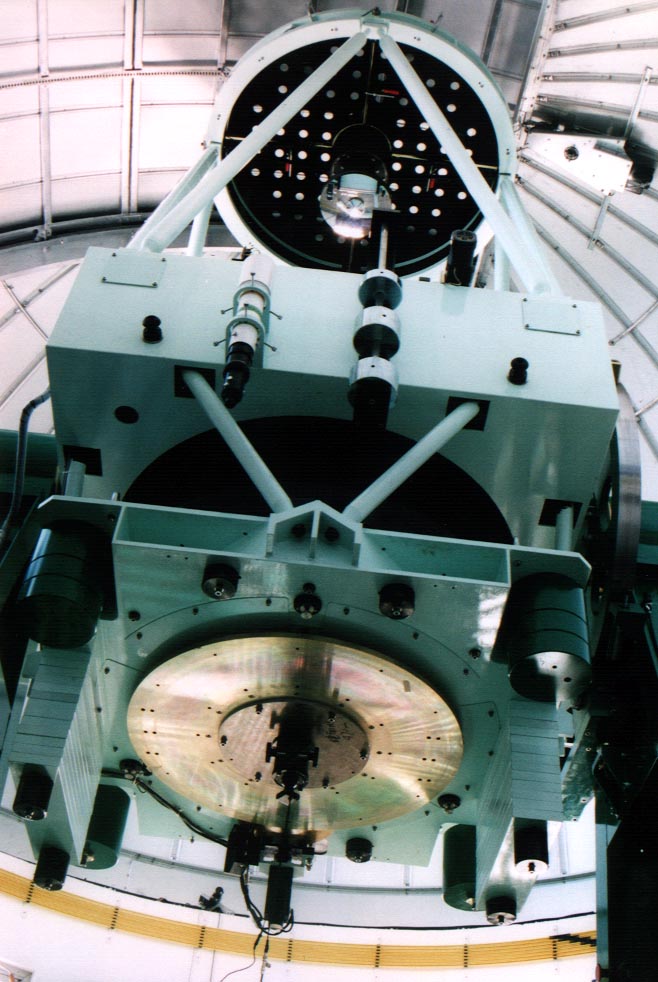
望遠鏡の全体像
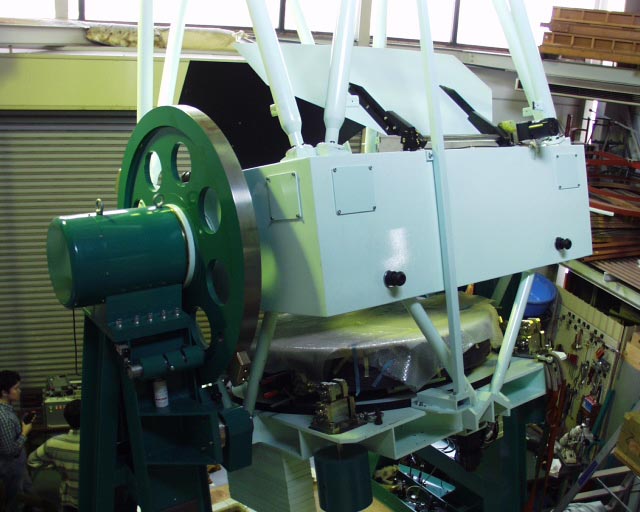
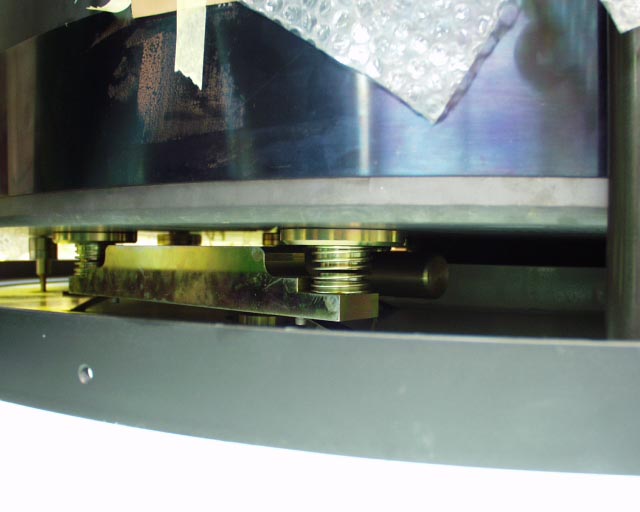
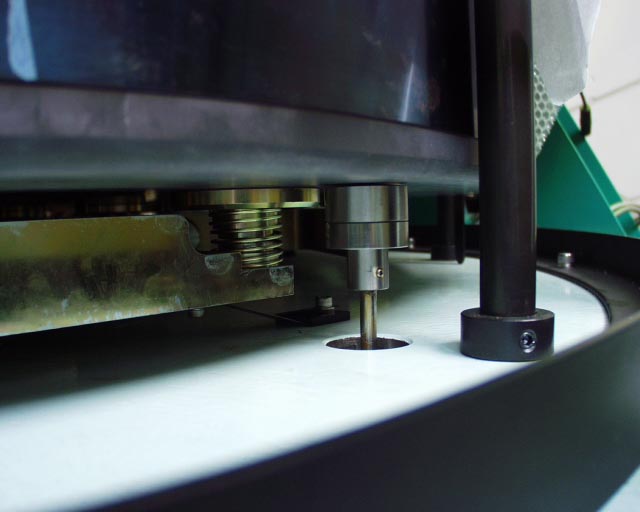
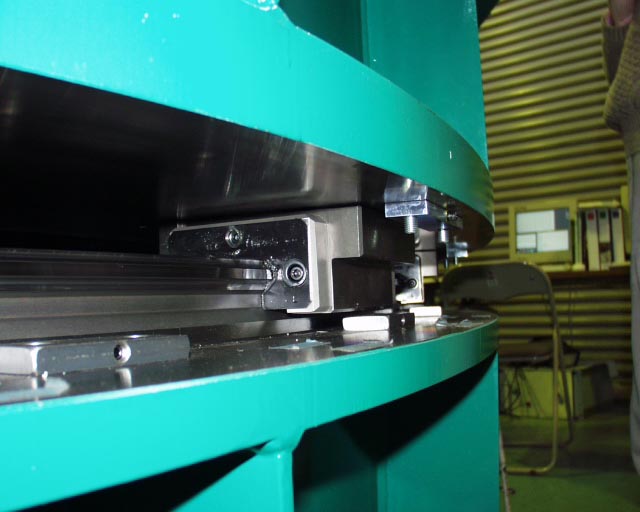
| 鏡筒の全景 | 高度軸の全景 | フリクション駆動部の詳細 | トップリング |
 |
 |
 |
 |
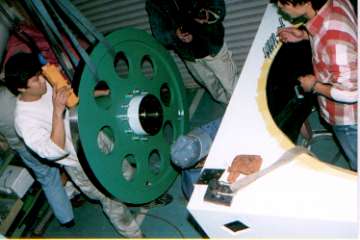
| 主鏡セル | 主鏡を支える構造その1 | 主鏡を支える構造その2 | センターセクション |
 |
 |
 |
 |
| 観測装置ローテータ | ローテータのリミットスイッチ | 鏡筒トラス | センターセクションに設けられた主鏡のふた |
 |
 |
 |
 |
| フォークその1 | フォークその2 | フォークその3 | トップリングに取り付けたハルトマンパターン |
 |
 |
 |
 |
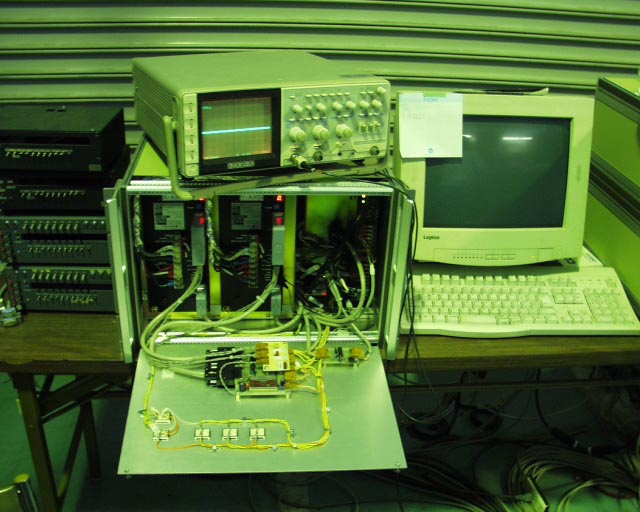
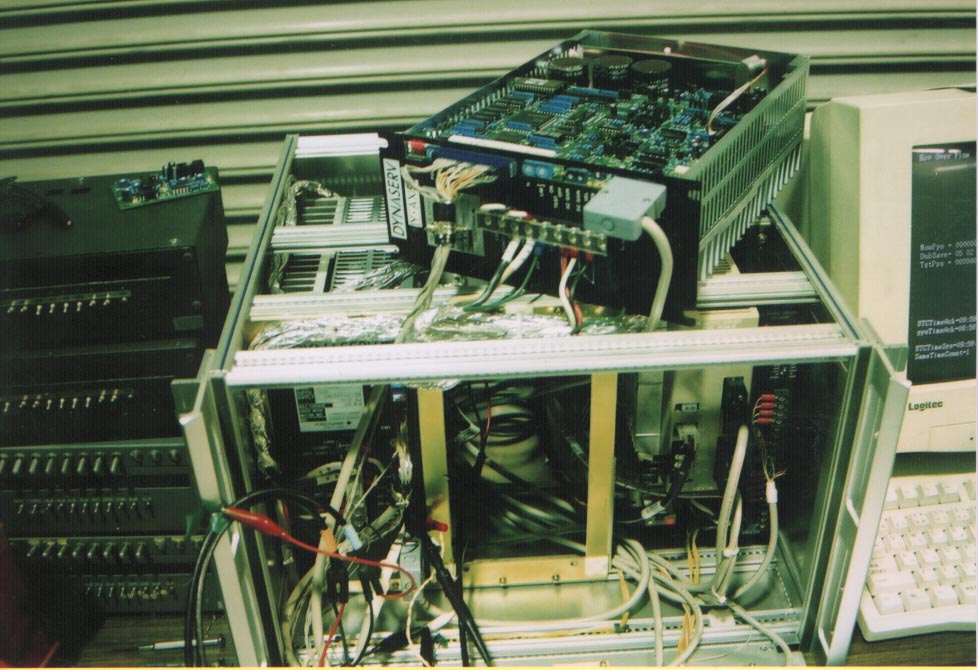
| 方位軸のRガイドその1 | 方位軸のRガイドその2 | 制御装置の全景 | 観測を支援するためのコンピュータ |
 |
 |
 |
 |
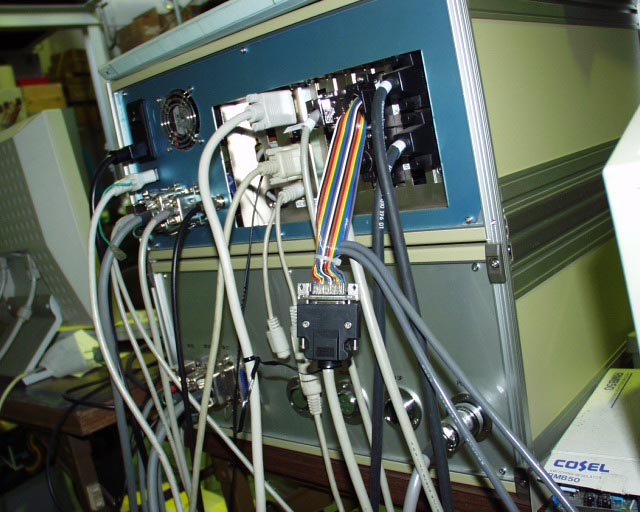
| 制御装置の裏側その1 | 制御装置の裏側その2 | 試験観測用のCCDモニタ |
 |
 |
 |
最初の試験観測
| 試験観測の様子 | 恒星のCCD映像その1 | 恒星のCCD映像その2 | 恒星のCCD映像その3 |
 |
 |
 |
 |
駆動特性を見る
| 特定の位置で振動が始まる | 改善された駆動特性 | リサージュを見る | 高度軸を改善する前の駆動特性 | 方位軸の再現性を測定する |
 |
 |
 |
 |
 |
高度軸の駆動特性を良くするためにフォークの共振を防ぐ
| フォークの防振その1 | フォークの防振その2 | フォークの防振その3 |
 |
 |
 |
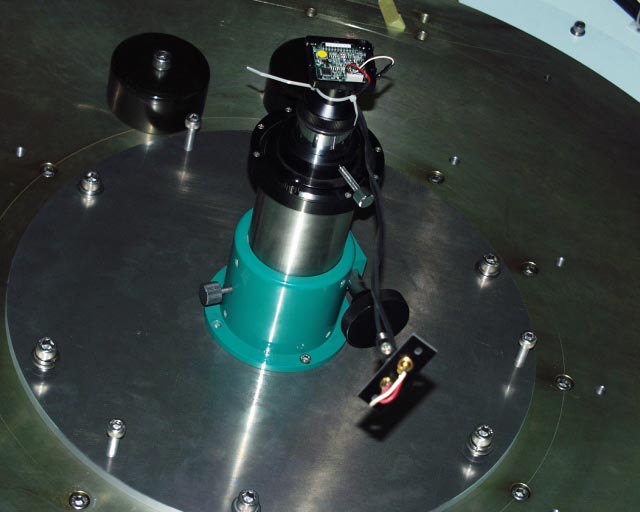
観測装置回転機構(インスツルメントローテータ)の性能試験
| ローテータにSIRIUS相当の荷重をかける | 副鏡に平面鏡を置き、オートコリメータで光軸の変化を見る |
 |
 |
梱包作業
| Rガイドのブロックを固定 | ラミネートフィルムで密封 | 木枠に補強の梁を渡す | 完全に木箱に納まった方位ベース |
 |
 |
 |
 |
望遠鏡設計・製作の記録
- 概念設計に着手(1998年~1999年8月)
ラフスケッチは西村製作所と河合が別々に行い、突き合わせて、双方の良い部分をとりいれる。
望遠鏡の主鏡と副鏡(ロシア製、1.4mカセグレン光学系)に合わせた仕様の経緯台とする。
| DESING-KAWAI | DESING-NISIMURA |
 |
 |
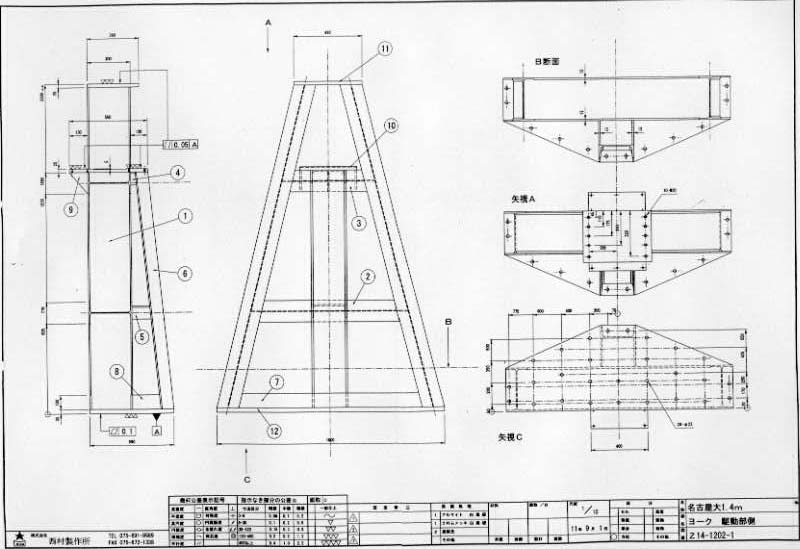
- 西村製作所によって本設計が始まる(1999年4月~10月)
| フォーク部分の明細設計図 |
 |
- 1/5モデルの製作(1999年1月~)
本機に先駆けて1/5モデルを製作し、その中で新しい試みや機構部品を検証し、実際の望遠鏡
の製作にフィードバックする。この写真はC館5階とB館のつなぎでの試験観測。
| 1/5モデルによる星の追尾試験 | 1/5モデルの制御装置 | 1/5モデルの設計図 |
 |
 |
 |
- 1999年8月~加工部品を順次発注
上2枚の写真は「ナカサク」でのもの。とてもきれいな溶接に感心した。この部分はRガイドの取り付け基準面になるが、後で紹介するように、歪みも少なく、とても良い仕上がりであった。
下2枚の写真は「西浦製作所」でのもの。
| 経緯台の方位回転テーブル | フォーク | 主鏡セル | 鏡筒センターセクション |
 |
 |
 |
 |
- 1999年10月~完成した部品から仮組み立て開始、ターンテーブルの搬入
| 回転テーブルの搬入 |
 |
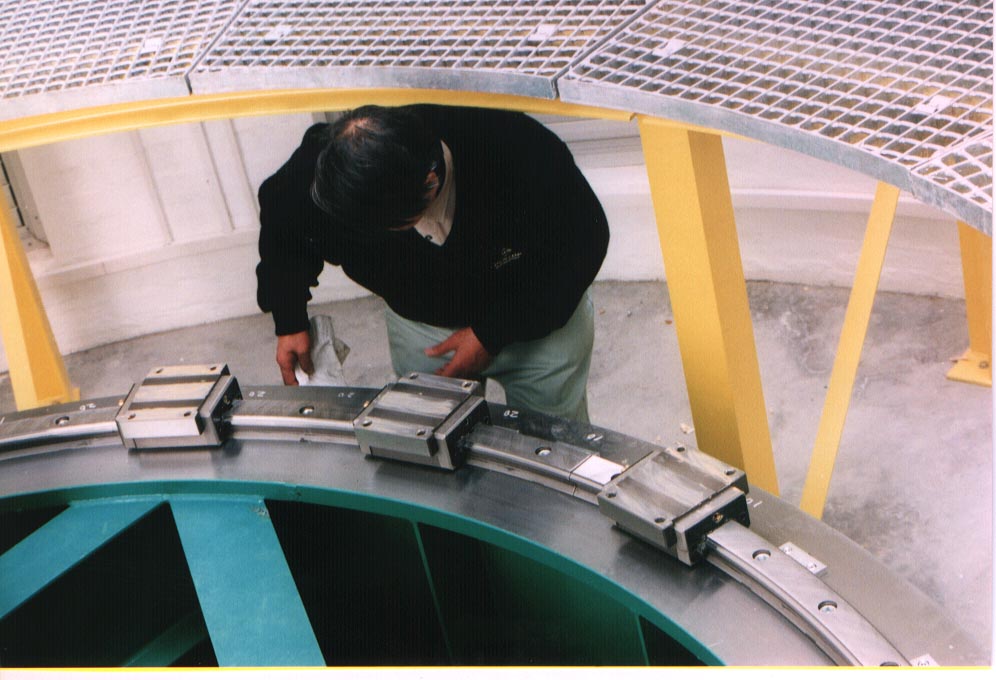
- 1999年10~Rガイドの取り付け
多数の水準器によってRガイド取り付け面の誤差を測定、誤差分のシクネスゲージを入れてRガイドを水平になるよう取り付ける。この時点での水平からの誤差は40μm以内となった。
| Rガイド取り付け部分の検査 | 方位軸の組み立て |
 |
 |
- 1999年11月~センターピースの組み立てと軸心の測定
センターセクションの軸取り付け基準面に反射鏡を取り付け、ライカ社のトランシットに付属するオートコリメータによって基準面の傾きを調べる。基準面の平行と芯を機械加工に頼ったが、加工機械の性格から、1分程度の傾きが残ってしまった。
| 鏡筒センターセクションの軸取り付け基準面の検査 | 微妙なトランシットの高さ調整 |
 |
 |
- フォークの取り付け、フォーク頂上の高さと水平を調べる
ターンテーブルはたいへんスムーズに動く。約10Kg程度で周囲を推すと動き始める。動き始めの摩擦抵抗を手元に全く感じさせないことから、Rガイドによる方位軸の組み立ては成功と判断。
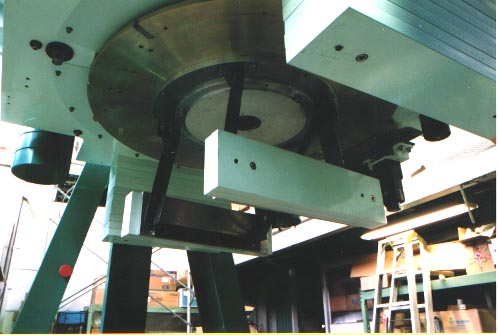
- フリクションホイール(摩擦駆動)の組み立て
軸受けベアリングの芯振れ誤差を測定し、合わせを確認して軸受けを組み立て、軸の振れを確認した。フリクションホイールを挿入すると、軸の取り付け精度(芯振れ)は調べることができない。
| 鏡筒センターセクションの軸取り付け基準面の検査 | 微妙なトランシットの高さ調整 |
 |
 |
- 1999年12月~センターピースをフォークに乗せる
この時点で軸端に反射鏡を置き、軸の傾きを調べる。西村製作所の中二階にオートコリメータを置いて見るが、近くを通る鉄道などによる揺れ(周期数秒)や測定者自身の揺れで10秒以下の傾きは読めない。
| 高度軸をフォークに乗せる |
 |
- トップリングの組み立て
スパイダーの締め金具で副鏡のセンターを出すのだが、最終的にスパイダーの張力を合わせなくてはならないので微妙な調整となる。
| 仮組み後塗装されたトップリング |
 |
- 2000年1月~主鏡セルと主鏡の取り付け
| 主鏡を入れた主鏡セル | 主鏡セルを下から見る |
 |
 |
- 2000年2月~
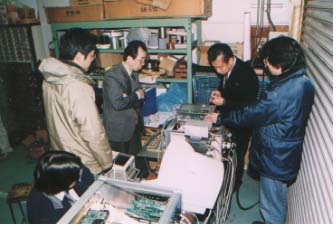
制御装置、モータ等を取り付け、総合試験に入る。
制御用コンピュータのバグ取りにかなりの時間を費やした。入出力関係の基本的な問題は解決したが、制御系にまだ問題が残っていると思われる。
| 制御系コンピュータのバグ取り | ホスト指令運転での問題点を検査 |
 |
 |
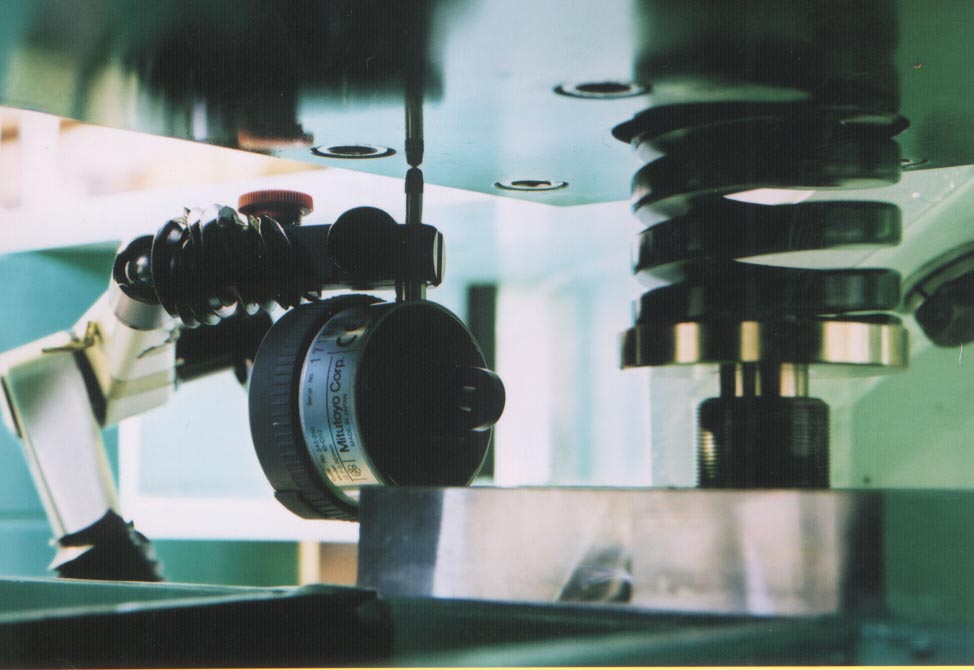
- 副鏡の傾きを調べる
望遠鏡の焦点にオートコリメータをセットして副鏡の傾きを調べる。現時点ではこの方法しか確かなデータとして確認することができない。様々な調整の結果、傾き45秒、芯振れ0.2mm以内を達成しているように見える。
| カセグレン焦点に取り付けたオートコリメータ | 副鏡の様子 |
 |
 |
この試験によって、副鏡の取り付け方で鏡筒を傾けたときの光軸のずれが減少することに気付く。
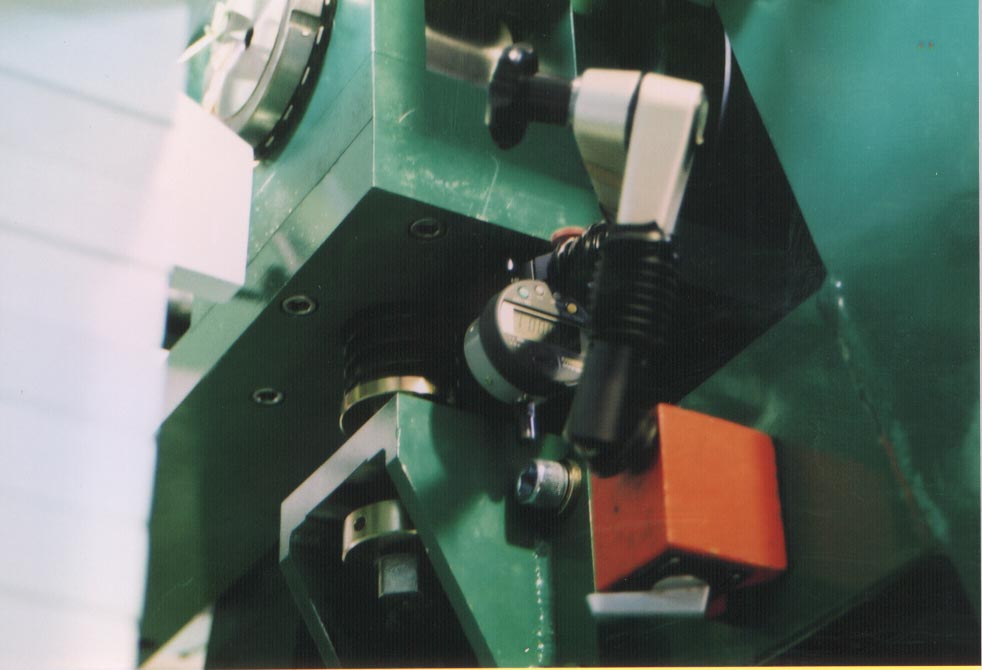
- センターピースと主鏡セルの相対的な動きを調べる
センターピースに取り付けた方位軸が当初から誤差を含んでいることが分かっているため、その影響を確認するためであった。しかし、マグネットスタンドの撓みやヒステリシスなどがあり、さらに、マグネットスタンドを取り付けている面自身も動くことがわかって、正しい測定方法がなかなか見つからない。
| センターピースの歪の測定 |
 |
- モーターの制御特性を調べる
FFT試験によって鏡筒とターンテーブルの固有共振周波数がわかる。この時点では安全性確保のため、大きな振動入力を与えることはできず、正確な測定になっていない可能性がある。
| FFT解析によるモータ制御特性の測定 |
 |
- 改めて横河の協力を得てFFT試験を行なう
先のFFT試験から高度軸の制御がたいへん難しいということがわかっていたので、まず始めに、全ての付加回路を取り去った状態でFFT試験を行ない、特性を把握した後、前回のフィルターより強力なイコライザーを試した。
| 調整しやすいようにモータ制御装置を筐体から取り出している | FFT解析装置 |
 |
 |
フリクションのばねを緩めて、モータ取り付け部分だけの共振特性を見る
| フリクションのばねを緩める |
 |
| フリクション駆動部分の歪みを見る | モータ取り付け部分の歪みは見えなかった |
 |
 |
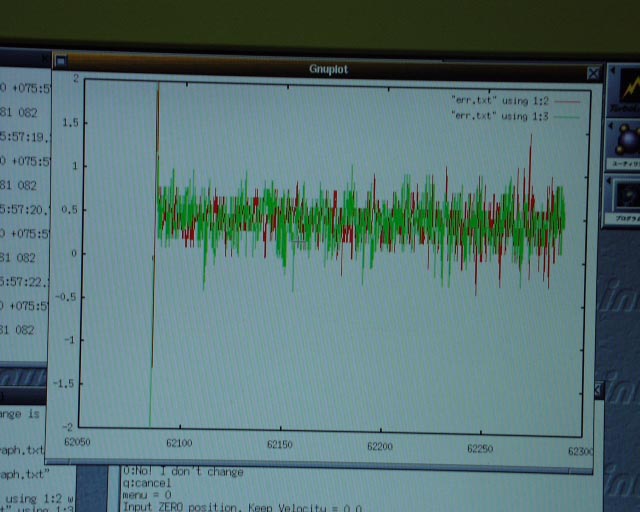
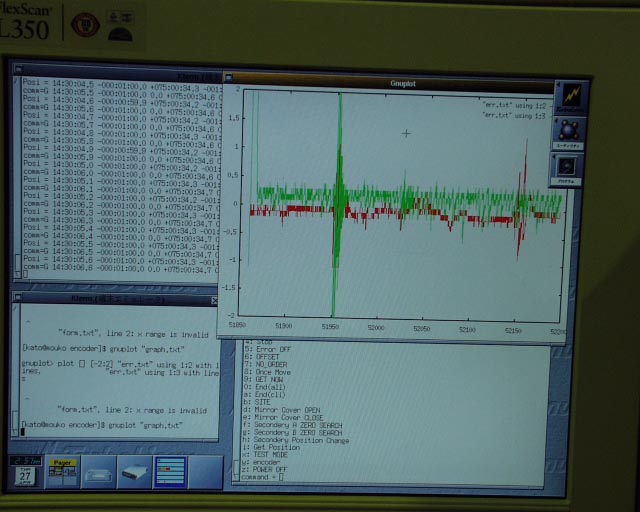
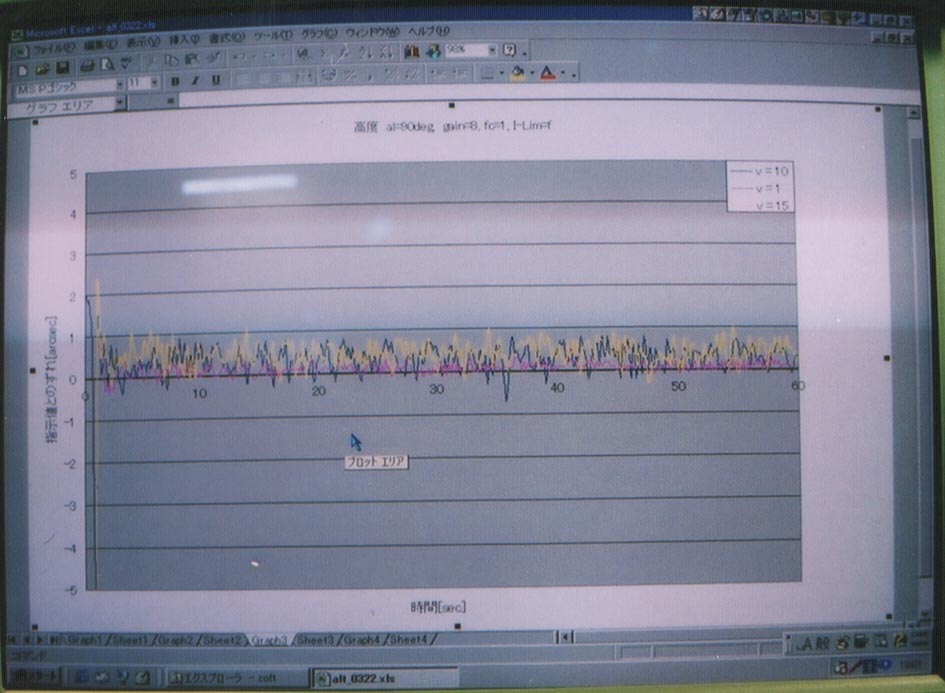
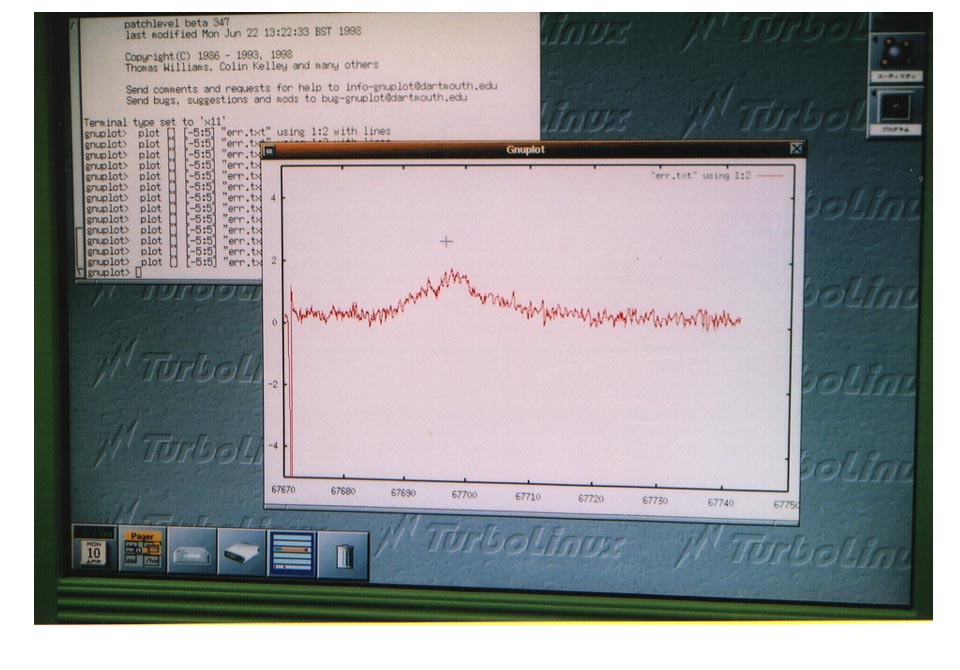
- 高度軸の運動性能
高度軸のエンコーダ出力(0.1秒のサンプリング)をエクセルのグラフ機能で描画すると、概ね1秒位内の駆動が実現していることがわかる。
| 高度軸の運動性能 |
 |
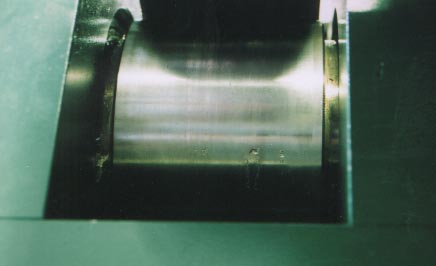
- フリクション駆動部分の傷
これまでの駆動試験で発振状態となったためにフリクション駆動面が焼け付きによる損傷を受けた。この傷は出荷時には修正できそうだ。
| モータ側(小径)駆動面の傷 | フリクションリング(大径)駆動面の傷 |
 |
 |
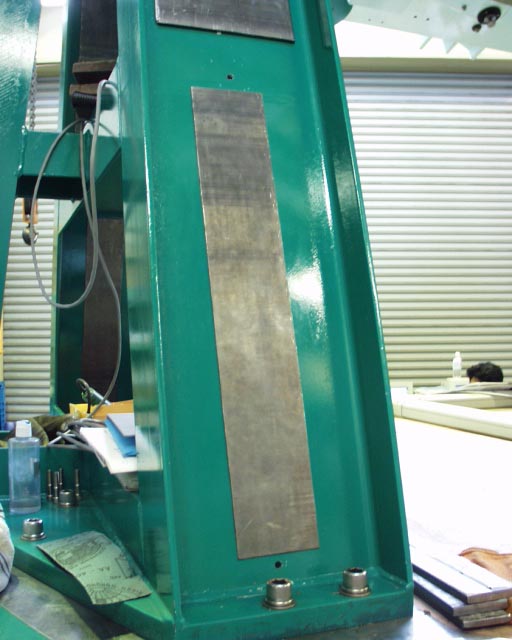
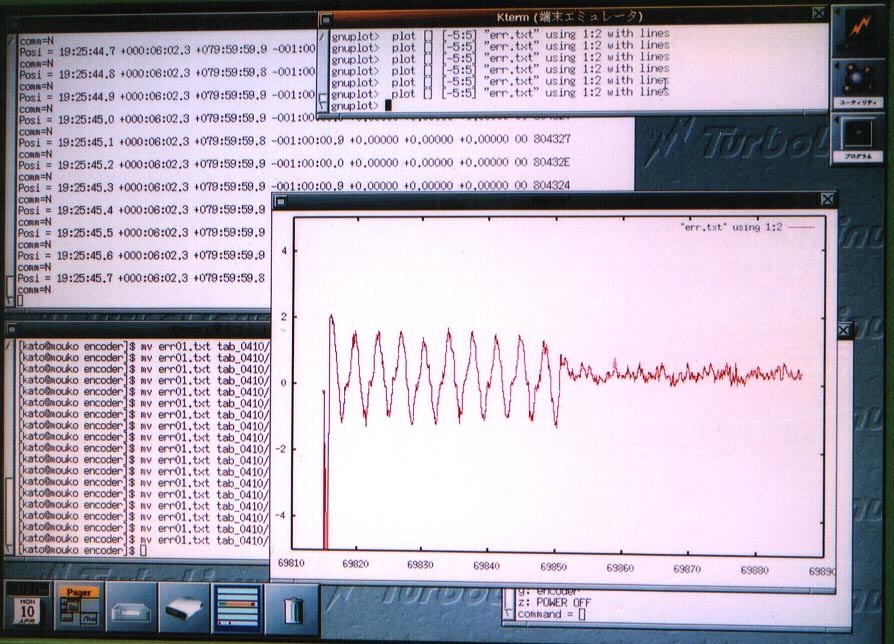
- 高度軸駆動の共振防止(2000年4月10日)
高度軸駆動時にフォークが共振して、大きな音が出る。この共振はモータ駆動にとっても有害なので共振を防止しなければならない。
フォークのH鋼に両面テープで帯鋼を付けてみると共振を押えることができた。帯鋼をボルトで固定すると再び共振が出る。両面テープに防振効果のあることがわかった。
| 防振のための帯鋼(両面テープで固定) |
 |
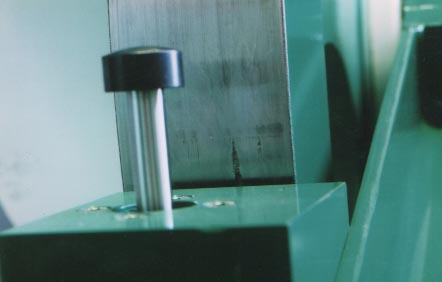
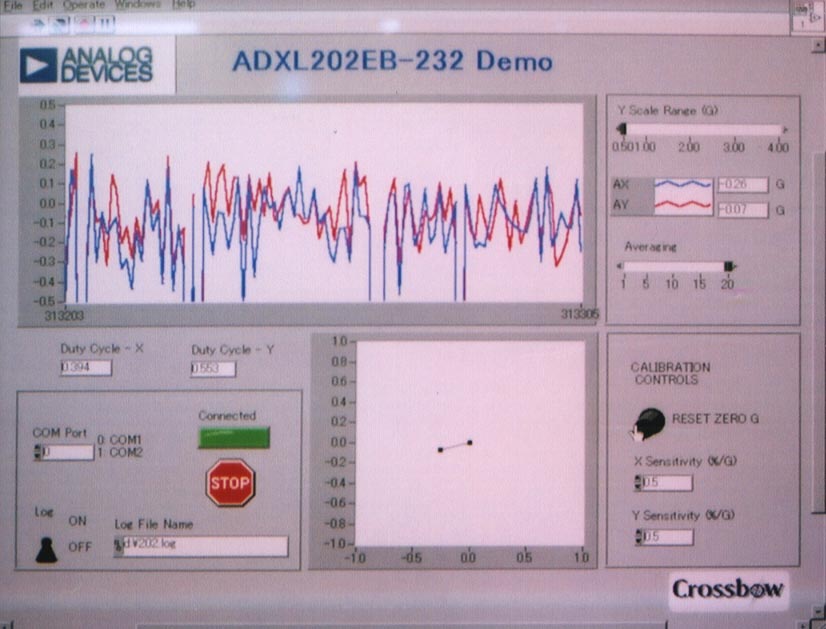
- 加速度計の設置
加速度計をフォーク部分に設置し、振動を見る。雑音に埋もれ、有害と思われる振動は見えなかった。地盤が静寂になった深夜に測定する必要がありそうだ。
南アフリカは地盤の振動が非常に少ないので望遠鏡の振動を捉えることができるかもしれないが、有害振動の問題はなさそうである。
| フォークに取り付けた加速度計 | 加速度計のデータを見る |
 |
 |
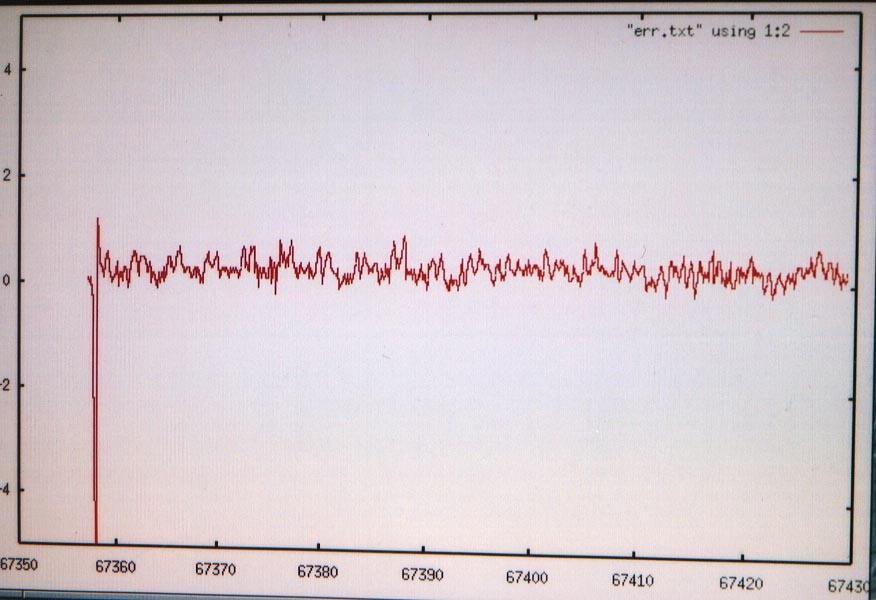
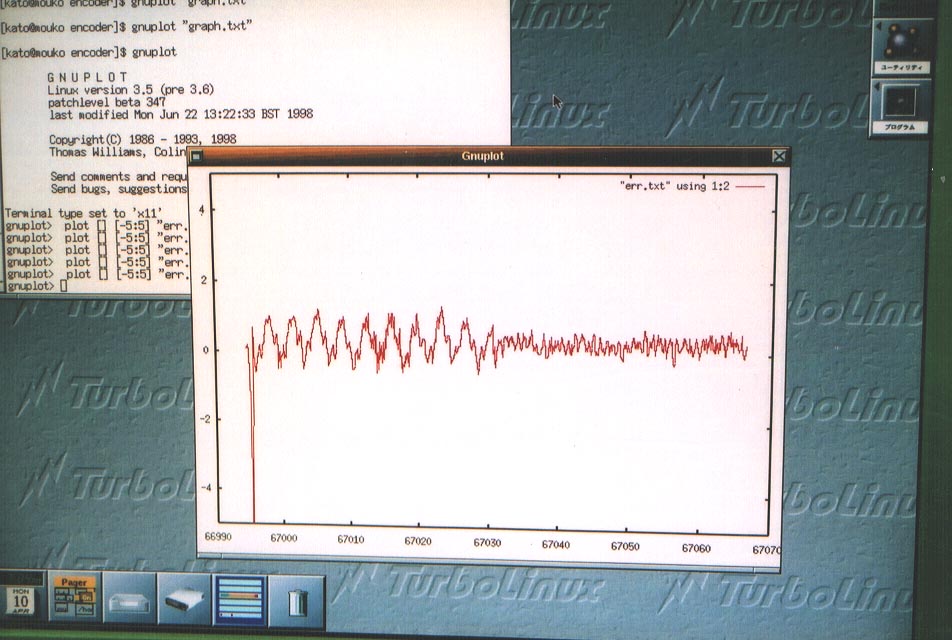
- 方位軸エンコーダの補正
方位軸エンコーダには読み取り部分の僅かな狂いによって、主目盛に同期した繰り返し誤差が出る。この誤差は駆動時にエンコーダの値を補正することによって修正できる。
補正の実験は、エンコーダの誤差のパターンを20度毎に収集し、補正テーブルを作成して駆動時にエンコーダの値と補正テーブルの値を演算した値を参照することによって繰り返し誤差を軽減させることができた。この実験によって得られた精度はrms0.2秒角以内であった。
補正は補正テーブルをまたぐ部分で最も悪くなる。以下はその境目を調べたものである。
| 補正が成功している部分 | 前半補正値が不適切な部分 |
エンコーダ側に何らかの異常(ゴミの付着など)がある部分 | 補正の位相が逆になると誤差は2倍となる |
 |
 |
 |
 |
- ひずみゲージによる鏡筒トラスの解析
鏡筒トラスについての解析手段として、ひずみゲージを用いる。ひずみゲージは構造物表面の変形量をゲージ抵抗値の変化に反映させて、ひずみ量を測定しようというものである。
これまでの測定で、トラスの中央部分では曲げ応力は検出せず、トラス結節点の最大曲げ応力についても許容値の1/10程度であることが確認できている。今後は、全てのトラスの中央部分の応力を見て、鏡筒の応力バランスを確認する。
| 鏡筒トラスに貼ったひずみゲージ |
 |
- ローテータの負荷試験
ローテータに実質負荷をかけ、鏡筒光軸のずれのないことを確認した。ローテータの駆動能力についても確認できた。
| 副鏡の中心に平面鏡を取り付けているところ | オートコリメータで光軸の変化を見る |
 |
 |
- 制御ソフトの総合試験
ハルトマン試験を繰り返しながら、制御ソフトの総合的な試験を行なってきた。その結果、ローテータ制御にバグがあったのを最後に、基本的な機能についての十分なデバッグができたと判断する。ドーム制御や、温度変化の補償は現地で最終的に行なう。
現状での到達点は、追尾精度0.5秒以内を達成したといって良い。今後は、現地での再組み立てでこの精度が達成され、さらに調整を進めて、追尾精度を上げる余地がどれほどあるかという問題である。シーク電子が製作している自動ゲイン切り替え装置が額面通り動けば、現地でのさらなる追尾精度向上が期待できる。
- ハルトマンパターンによる光軸調整
最初のハルトマン試験によって鏡の傾きがわかったので、修正後再度ハルトマン試験を行なった結果、0.33秒角となった。シーイングの悪い日本で0.3秒程度まで追い込んでいるが、これ以上は日本では難しいので、現地で再組み立て後、時間をかけて再調整することになるだろう。
| トップリングに取り付けたハルトマンパターン |
 |
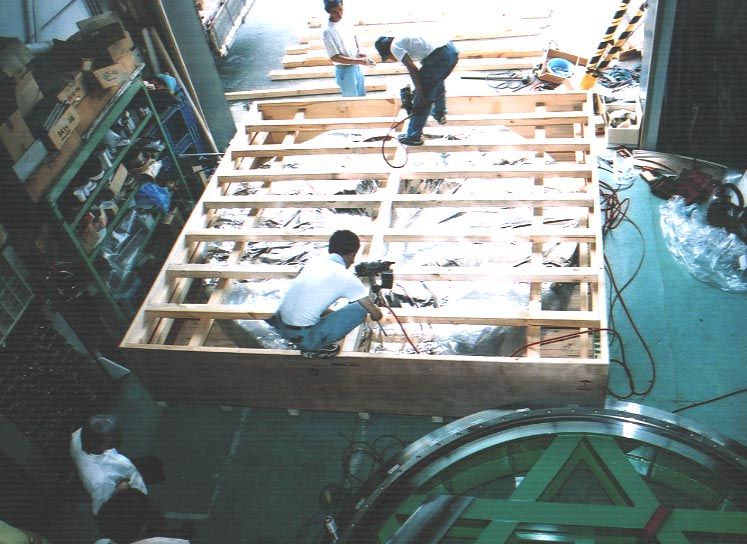
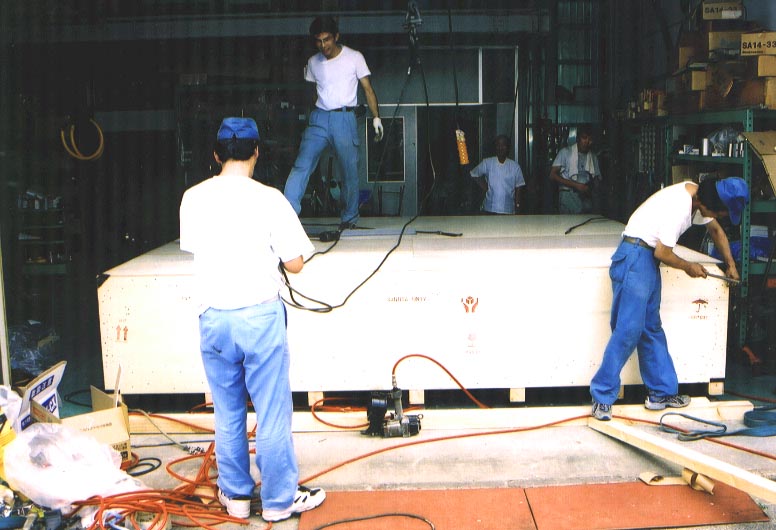
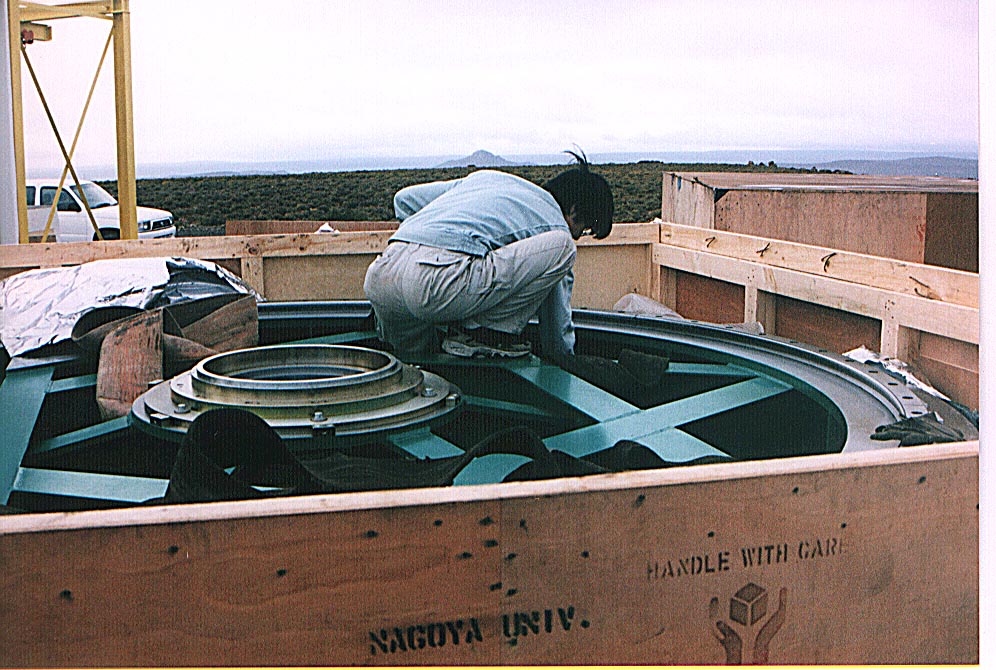
- 分解、梱包作業
7月3日より、分解、梱包開始、6日にはベースの梱包に入っていました。船便は長期間船底に置かれ、温度変化による露結で内部が水浸し状態となることから、その対策が必要となります。今回は真空梱包という方法を採用しました。真空梱包とは、ラミネートフィルムによる完全密閉包装の技術です。
| Rガイドのブロックを固定 | ラミネートフィルムで密封 | 木枠に補強の梁を渡す | 完全に木箱に納まった方位ベース |
|
|
|
|
基本的な考え方と実際の望遠鏡
1、基本的な考え方
・初期段階の設計はコンペで
最初のラフスケッチを、業者と大学側の双方で別々に行ない、夫々の良い部分を取り入れて、詳細設計に移行することにしました。これは、業者側と大学側の望遠鏡に対する考え方の違いなどを擦りあわせるために、是非とも必要であると考えたからです。
ともすれば業者に丸投げということが多いのですが、実際の研究現場から技術的な情報を業者にどのように伝えるかは重要な問題です。今回はコンペ方式で互いに競い合うことによって、研究現場からの要求を分かり易く提示することを目指し、大学側は河合がラフスケッチを担当しました。
・できる限り市販の部品や構造材料を使う
これは、製品の原価を引き下げることもありますが、市販の部品や構造材料を使ってどのような望遠鏡ができるか、という挑戦でもあります。特殊な部品や技術を用いれば実現できるかもしれませんが、それでは望遠鏡技術が非常に特殊なものとなってしまいます。汎用の技術や市販されている工業製品によって実現してこそ、汎用性の高い技術を獲得できるという考え方を推し進めました。多くの場合、技術的なブレークスルーはこれまでに組み合わされれなかった技術の出会いによって実現できるものです。
今回の私たちの望遠鏡は、それを見事に証明できたと考えます。
2、ドーム内部の気流を考慮した設計を取り入れる
・ドーム外壁に空気取り入れスリット
ドームにも窓を多く開けて外気気流を取り入れ、自然な気流が望遠鏡全体を包むような設計をめざしました。
・主鏡付近の気流を乱さない設計
望遠鏡のシーイングを悪くしているものに、主鏡上面の乱気流があります。昼間の間に暖められた主鏡は夜になってもなかなか温度が下がりません。従って、積極的に主鏡付近の自然な気流を利用することを考えた設計としました。
3、望遠鏡架台
・経緯台方式を採用する
赤道儀と比較した場合の経緯台のメリットととしては、ドームを小型にできることと、材料力学的に見て無理な構造がないことによって設計の負担を軽減できます。これはコスト削減にもなります。
デメリットととしては、制御しなければならない軸が一つ増える事で、制御システムが複雑になる事です。
しかし、最近の高精度の望遠鏡追尾においては、たとえ赤道儀と言えども、大気の補正や鏡筒撓みの補正を実施しなければならず、非常に高い精度の2軸制御が要求されます。したがって、最近のコンピュータ技術の進歩によって2軸制御と3軸制御の差はほとんどないと言って良い状況となり、必ずしもデメリットとは言えないようになってきました。
現実に、私たちの望遠鏡は、副鏡の駆動や鏡筒の熱膨張を補正する機構などを入れると、実質的には5軸制御となっております。同程度の精度を得ようとすれば、赤道儀においても4軸制御となるので、その差はほとんどないと言って良いでしょう。
我々の望遠鏡は、補正なしで17秒角を実現した事から、構造的な欠陥の少ない、非常に精度の良い装置となりました。
コスト的にもドームが小型になったことで建物のコストが圧縮されたほか、架台そのものの製作費用も構造が簡単になった分、圧縮できました。
以上のような観点から、今回の私たちの望遠鏡は、1.4mクラスの小型望遠鏡でも経緯台にするメリットが十分あった事を証明したものと考えます。
4、鏡筒
・オープントラスを採用
赤外線望遠鏡の鏡筒は赤外線放射面積の少ないトラス型でなくてはなりません。可視の望遠鏡も、最近はオープントラスのものが主流になっています。
・セルリエトラス方式を採用
セルリエトラスとは、トラス鏡筒の撓みを利用して主鏡と副鏡の光軸変化を一定に保つ方法のことです。我々の望遠鏡は解析の結果、トラスというよりもラーメンに近い構造である事が分かりましたが、セルリエトラスを意識した分、高度角の違いによる光軸のずれは少ないはずです。ハルトマン試験の分析が不十分なため、まだこのあたりの問題はわかりません。
トラスの解析も十分できたとはいえませんが、光軸を保つ強度は十分あるようです。さらに、トラスの結節点は撓みを利用したものですが、撓み部分の歪は繰り返し応力による疲労に耐えるもであることは確認しています。
・主鏡セルは鏡に重力による撓みを打ち消すバランサによる支持方法をとる
鏡筒の傾き角によって主鏡の撓み方が違ってくるので、それを補正する機構を入れました。しかし、この部分の問題もハルトマン試験の結果を待って微調整しなければならない部分です。
・副鏡振動装置
現在はありませんが、将来、副鏡振動装置を取り付ける寸法的な余裕を持ち、トップリングやスパイダーに十分な強度を持たせるようにしました。
副鏡振動装置は現在開発に着手したところですので、この部分の強度や振動がどのようになるかは不明です。
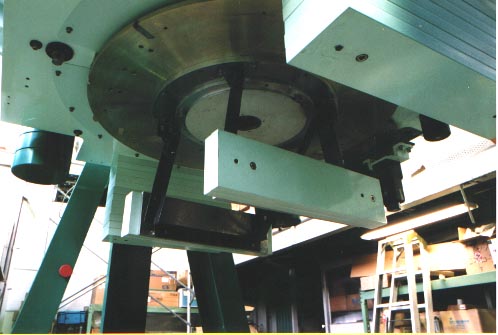
5、軸受け機構
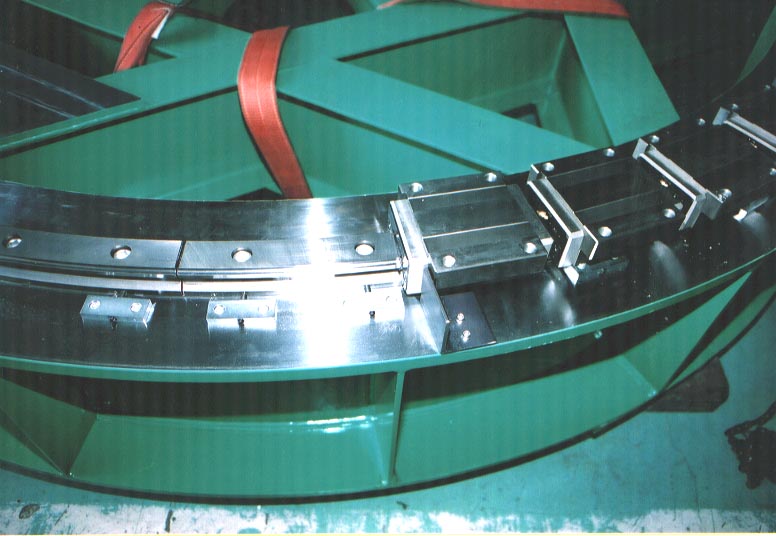
・方位軸はRガイドを用いる
 |
| THKのRガイド |
RガイドはTHKの商品です。直線案内ベアリングに世界的なシェアを持つTHKが開発した大R案内のベアリングです。ちょうど直線レールをRレールにした構造になっています。
このRガイドは残念ながらまだ厳しい精度の要求される場所での使用実績はありませんでした。しかし、この構造は直線案内ベアリングと同一である事から高い案内精度が得られると考えました。Rガイドを採用する事によって、ターンテーブルの小型化と単純化を図る事ができ、コルトダウンに貢献しました。
Rガイドの設置は直線案内ベアリングと同程度の精度を必要とします。今回はそれが可能かどうかが、精度維持の最大の問題点となりました。しかし、我々の望遠鏡は、それが非常にうまく行った事を証明しました。
・高度軸は一端固定、他端支持
汎用のベアリングを用いて、駆動側を固定端、反対側を支持端とする一般的な使い方です。ただし、支持端側にニードルベアリングを用いる事によって、鏡筒センターセクションと軸の撓みを軽減しようという意図でしたが、実際にどれほど効いているかは分かりません。
6、市販のエンコーダを用いる
・各軸の角度読み出しはHEIDENHAINのインクリメントタイプ・ロータリエンコーダを用いる
| HEIDENHAINのインクリメントタイプ・ロータリエンコーダ |
 |
我々の望遠鏡の大きな特徴は、方位と高度に高分解能のロータリーエンコーダを用いました。市販されているものの中から、精度において定評のあるハイデンハインのものを用いました。このエンコーダはインクリメンタリ方式ですが、内部に原点出力を持っており、それを用いました。原点の再現性は結局のところ、読み出し精度で決まる事から、この原点出力は非常に重要です。
・方位軸読み出しは大口径の開放型ロータリエンコーダを用い中心に配線・配管が通る構造とする
大口径の開放型ロータリーエンコーダを用いる事によって開口部から配線や配管(冷凍機のヘリウムガス配管)などを通す事ができます。これによって、面倒なケーブル類の処理を大幅に簡略できました。
しかし、開放型の欠点として、読取りヘッドと目盛りリングの取り付け精度が非常に微妙になります。我々の望遠鏡においても、調整に多くに時間と労力が必要となりました。
・ローテータは一般のエンコーダを用いる
ローテータの精度は方位、高度軸ほど精度を必要としないので、一般的なロータリーエンコーダを用いています。
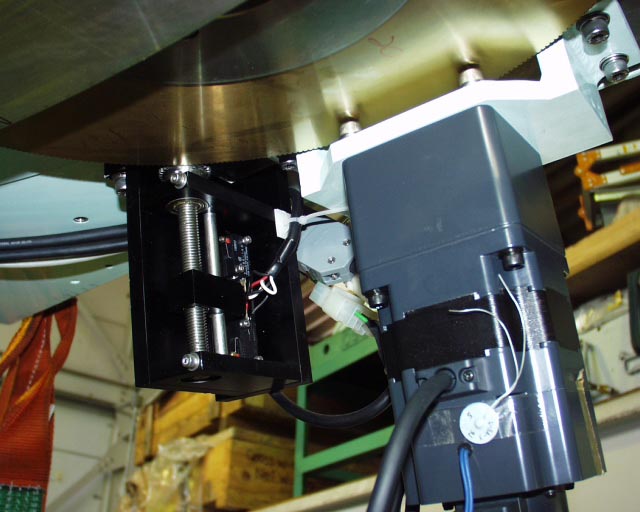
7、駆動方法
・方位、高度ともフリクションドライブとする
フリクションドライブは摩擦抵抗を利用した駆動方法です。無限に小さいギアと考えれば分かり易いでしょう。駆動モータ等も同一のものとして保守性を高めることも考えました。
・駆動はがたのない構造とする
せっかくフリクションドライブを用いるのですから、モータとフリクションドラムとの間に中間変速機を入れないようにしました。モータは超高分解能のダイレクトモータを使用しました。ダイレクトモータはカタログ的には理想的なモータのように見えますが、慣性負荷の場合、共振現象を制御する事が難しいという欠点を持っています。我々の望遠鏡はこの問題の解決に多くの時間を費やしました。
8、主鏡セルの構造
・主鏡保持機構とローテータを一体構造とする
主鏡支持部にインスツルメント・ローテータ支持部分の応力がかからない構造をとるべきですが、主鏡と焦点との距離が少ないため、インスツルメント・ローテータを含む主鏡セルに十分な強度を持たせられないことから、一体型の構造となりました。この部分は当初、この望遠鏡にTRISPECなどの大型観測装置(負荷重量500Kg)も乗せられるよう設計を進めていましたが、これはあまりにも欲張ったことだと判断し、実際に光軸の精度を保つことをができるのは200kg以下の観測装置ということにしました。
・主鏡歪補正機構
主鏡は真上を向いているとき最も正しい形状をしています。しかし、望遠鏡の高度を下げていくと、主鏡の角度も変化し、主鏡を支える場所のかかる荷重条件が変化して、主鏡の撓みもかわってしまいます。この荷重条件の変化を小さくするために、主鏡を支える部分を工夫したものが主鏡歪補正機構です。この補正機構は特許の関係もあって公開できませんが、重りを使った巧妙な機構で、夫々の望遠鏡メーカーによって、特徴が現れる部分でもあります。
9、その他
・リミットスイッチ
方位軸とインスツルメントローテータは500°ほど回転してほしいので、リミットスイッチに特別の工夫を施します。回転を直線運動に変換し、そこにリミットスイッチを取り付けます。
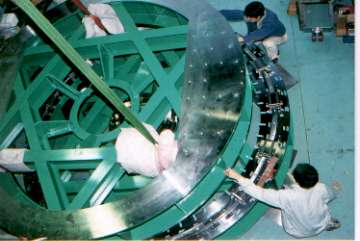
サザーランド天文台での組立て作業
作業日誌のつもりで書き始めましたが、いつのまにか風景や動植物など、思いつくままを書いていました。こちらでの作業の様子がわかれば、と思います。
書式が統一されていませんが、お許し願います。何しろ、途中で僕のノートパソコンが壊れてしまい、メモ帳で書き残したものを大急ぎで再編集しました。順次、仕事の進行状況に合わせた写真を掲載しますので、お楽しみに。(現在写真は大きいままです。あしからず!)
9月9日、名古屋11時発、集合時間9時
搭乗手続き等順調、荷物は一人20kgまで。厳重なので注意すること。
僕は6kgオーバーしていたが、栗田君と一緒にチェックインしたので、二人で40kg以内ということでOKがでた。
一人でチェックインした加藤君は8kgオーバーで、機内持ちこみ荷物としてオーバー分を分け、荷造りしなおすというハプニングとなった。
大型のスーツケース以外に、小型の手荷物ケースを持っていると非常に便利であることがわかった。
名古屋から全員一緒の飛行機に乗りこんだ。名古屋大学は長田、河合、加藤、栗田の4名、西村製作所は専務、関、柿本の3名、合計7名である。
名古屋からマレーシアのペナンまで6時間40分、給油時間1時間、次のクアラルンプールまで55分、合計8時間以上、時差1時間。ここで乗り換えのため6時間待つ。
クアラルンプール空港のレストラン(郷土料理)で夕食をとる。
飛行機を乗り換えて、ヨハネスブルグへ向けてへひたすら飛ぶ。
この間、飛行機はずっと夜の闇を飛行。
9月10日(日)
途中ヨハネスブルグで給油。ヨハネスブルグには午前6時到着。ここで給油のため飛行機から降り1時間の休憩。この間に空港の銀行で両替、レートは良心的。
おこずかい程度のお金しかいらないので、ここで日本円1万円をランドに交換した。約600ランドとなった。
午前7時ケープタウンに向け出発、日本との時差は7時間。ヨハネスブルグからケープタウンまで2時間。結局、いったい何時間飛行機に乗っていたかわからない。
| 上空から見た南アフリカの大地 | ケープタウンに着いた飛行機 | 到着ロビーへ向かうバス |
 |
 |
 |
ケープタウンに午前11時到着、レンタカー(ワーゲンの8人乗り)を借りてからSAAOの向う。4人が国際運転免許を持っているので、運転手4名(長田、関、加藤、河合)全員を登録する。
最初の宿は天文台通りとでも訳す静かな場所である。空輸便の確認をするが、火曜日にしか天文台に届かないとのこと。
この日は様子がわからないので、長田先生が車を運転。午後昼食をかねて市内観光、ウォータフロントで昼食、現地で調達できるものを購入。ここは観光スポットにもなっていて、治安が悪いといわれる南アフリカの中では最も安全な場所と言われている。
9月11日(月)
道路状況や交通の具合がわかったので、今日から河合が車を運転。
午前、サザーランド天文台へ向って出発、N1(国道1号線)は120kmの速度制限だが、途中から対面通行となり、120kmは結構こわい。
路側に退避帯があるので、後ろから高速で近づいてくる車には道を譲るのがルールのようだ。
譲られたらさっさと追い抜いて、ハザードランプを2回ほど点灯してお礼の意を示す。
譲った車からライトのハイビームで返礼がくる。この光による挨拶は気持ちがいい。
マイキスフォンテーンで昼食、ここは大きなホテルが一軒と、ブルートレインが停車する駅があるだけの町である。
それでも、南アフリカの中部地区では大きな町らしい。観光案内所やパブもある。
ここのホテルには、米国大統領一向が立ち寄ったらしい。このホテルの案内人は、モニカ・レビンスキーの座った椅子はこれだ!と説明してくれた。
ホテルの庭には小鳥の巣があって、気をつけないと鳥の糞が落ちてくる。ここのカレーライスはランチメニューの中で一番のご馳走。
ここからはR356という田舎道だが、100km以上で快適に走る。対向車はほとんどいない。
| サザーランド天文台の入り口ゲートにて |
 |
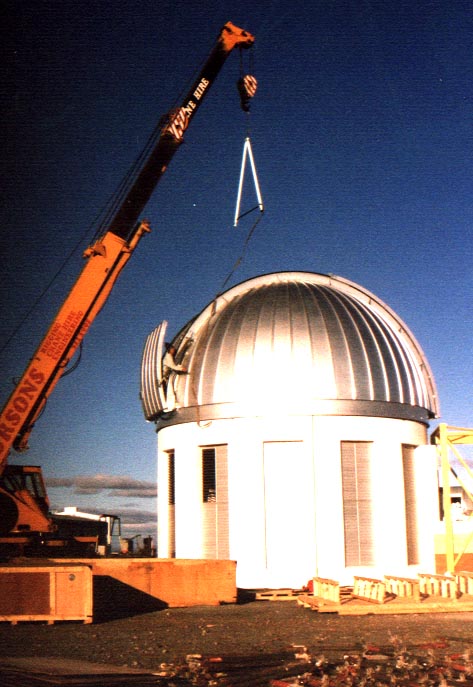
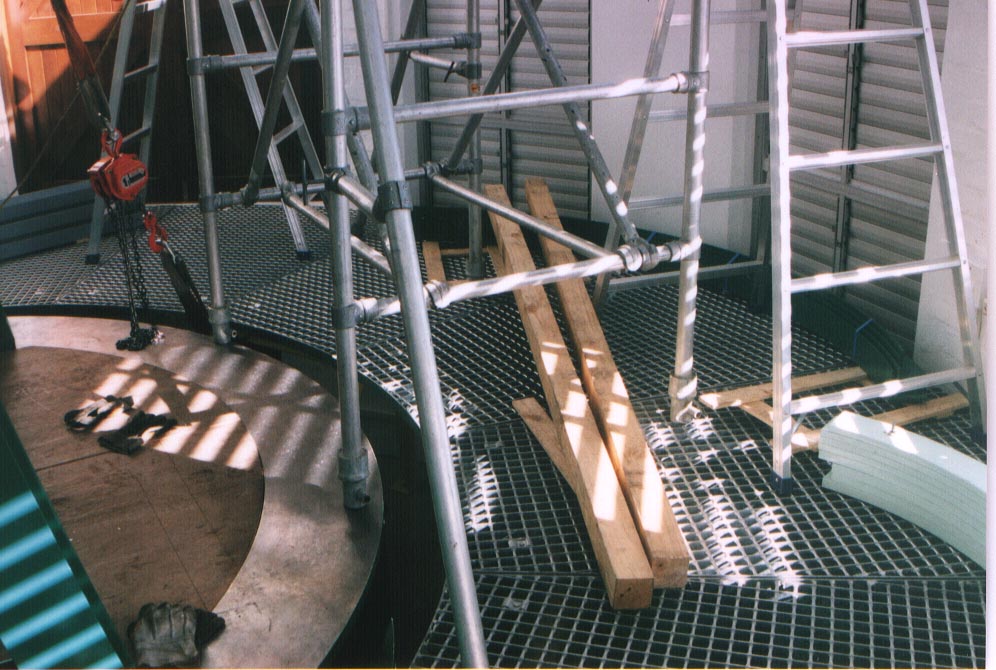
午後2時半サザーランド到着、クレーンがすでに上がっているとの情報から、直ちに作業開始。
船便のトレーラ積載荷物をクレーンで降ろす。その他の梱包を解いて、工具、ベースなどを取り出す。午後5時30分まで作業、夕食、6時20分から7時まで作業。
| 梱包を解くのも大仕事 |
 |
ベースブロックの下に敷く鉄板を接着剤(エポキシ、24時間硬化タイプ)で固定する作業。接着剤は鉄板とコンクリートの床との隙間を埋めて経時変化を防ぐもの。
ケープタウンで購入した接着剤を混合し、床に塗布、敷板(鉄板)を置く。
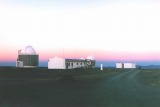
ここで、SAAOが用意してくれたドームを紹介する。
| これが我々のドーム | 我々のドーム入り口から西を見る
平屋の建物にトイレがある |
 |
 |
ドームには必要最小限の設備しかありません。トイレは西の建物まで歩いていく。もちろん、夜は真っ暗なので、懐中電灯は必需品。
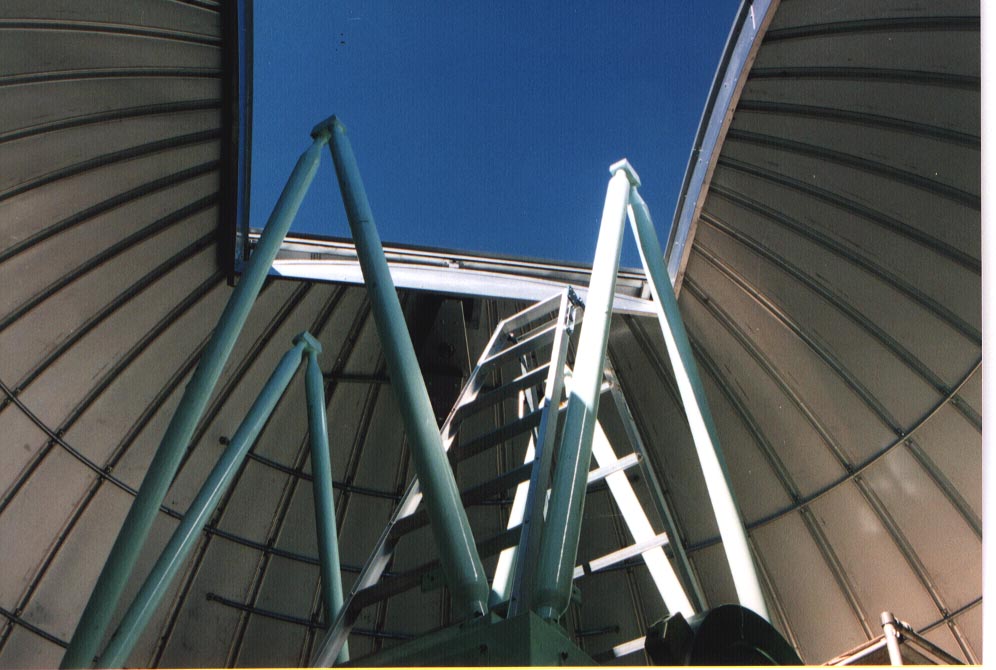
ドームの中は意外と広い・・・と最初は思っていたが、望遠鏡が入ってしまうと、ぎりぎりの大きさであった。
望遠鏡のベースに合わせたステップ
この下は荷物置場となる | ドーム内の風通しを
良くするためのルーバー | ルーバーの下側 |
 |
 |
 |
ドームは南アフリカ天文台が作ってくれた。アッシュドーム社のものだ。
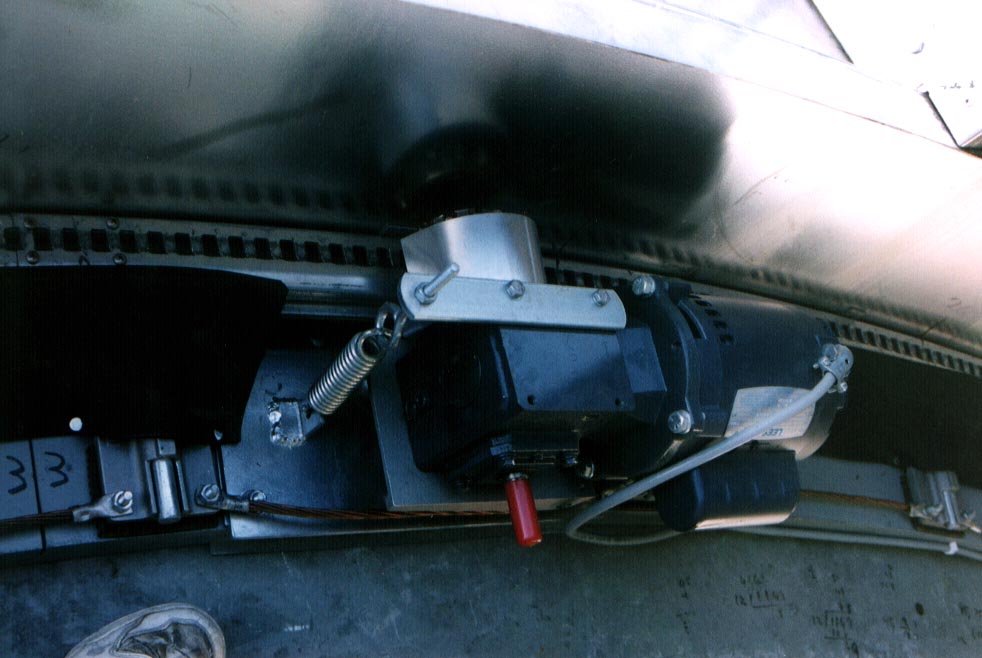
ドームを回転させる
モーターとスプロケット | 回転角度を読み取る
ロータリーエンコーダ | ドームのスリットとシャッター | ドームのモーターに電気を
供給するトロリー |
 |
 |
 |
 |
| ドームの電気配線用ピット(望遠鏡側) | ドームのLANとAC電源コンセント | ドームの電気配線用ピット(観測室側) | 日本の電源規格に変換するトランス(三相200V用) |
 |
 |
 |
 |
天文台4名、サザーランドホテル3名の宿泊割。若者は天文台、年よりはホテルというように分ける。サザーランドホテルは名ばかりのもので、民宿のようなもの。トイレや風呂、シャワーといったものは共同となっている。
部屋に暖房がないので、非常に寒い。クレーン操縦士のアーバンもここに宿泊している。
9月12日(火曜日)
午前8時半より作業。
作業者:日本側7名
SAAO6名作業者:日本側7名
天候不順で、例年になく寒い。
昨夜鉄板と床の間に入れた接着剤はまだ柔らかい。気温が低いので十分固まるには60時間かかるだろう。
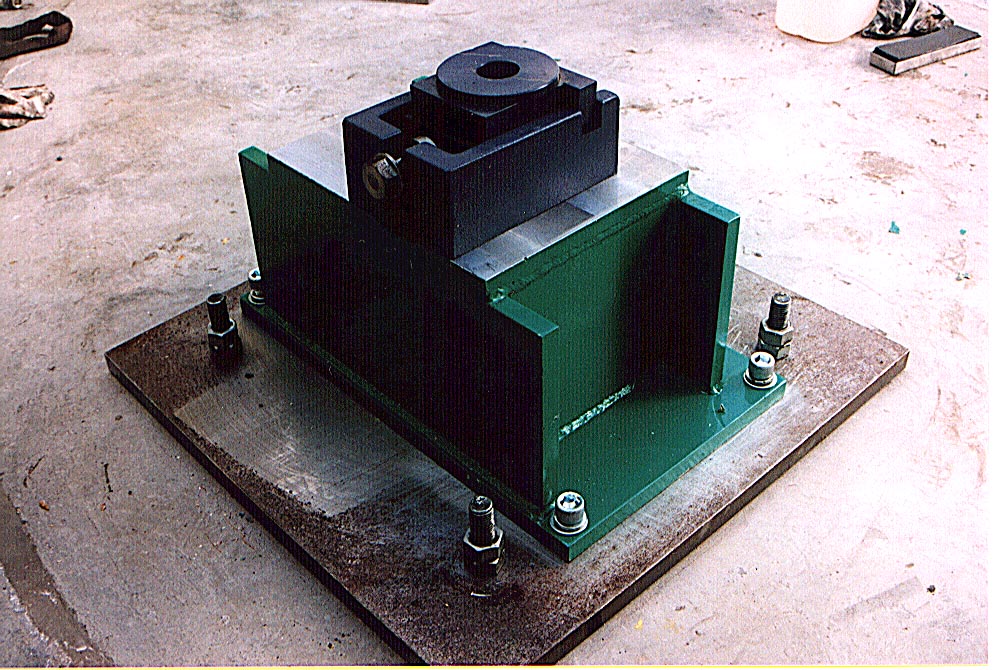
| 望遠鏡を支える6個のベース |
 |
ベースブロック両面のテープを剥がすのに適当な道具なし。てこずる。
航空便で送った荷物の中にこうした道具が入っているので、現地技術者の道具を借りて作業を行う。
ドーム内の掃除。外は強風で寒く、防寒着のない人は外の作業は不可能。梱包剤が風にあおられて飛んでしまうので、神経をつかう。時にか緩衝用ビニールが飛ばされたのを追いかけて2~3mも走る・・・ということもあった。
同時に、コンピュータの設定を行う。河合のパソコンはノート対応のネットワークカードがないのですぐにはつながらない。
まず長田さんのパソコンを設定することになった。
金工室へは井上さん宛てにEメールを出しておいたが、はたして伝わるか。
ネットワークカードを購入してすぐ送るようにお願いしておいたが・・・。
IPアドレスを8個もらうことになっている。関さんのネットワークカードを借りて明日セットアップすることにした。
今日着くはずの航空便で送った荷物が届かない。税関で引っかかっているようだ。
重要な工具類がこない(水準器、オートコリメータなど)ので作業できず。
午後から買い物に行く。
ベースをドームに入れる時、横向きにしてクレーンで吊る。クレーンの操縦士はアーバンさん。
| 梱包を解いて吊り下げにかかる | 吊りベルトを慎重にかける |
 |
 |
3点のブロックにておおよその水平を出しておき、6点を固定。
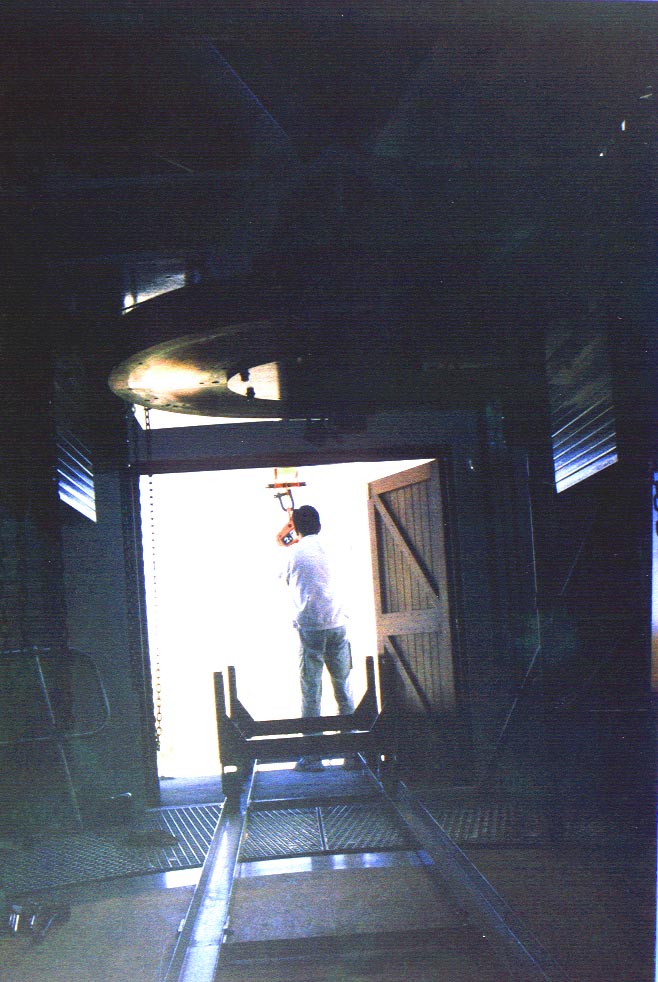
ベースをドームのスリットから入れる。
チェンブロックを使って水平に持ち上げ、宙吊りの状態でチェンブロックを伸ばし、ベースを横吊り状態にする。
約2トンの直径3.8mあるベースを吊り下げている光景は壮観だが、作業者は命がけである。
作業行程上、どうしても懸垂貨物の下に入らなくてはならないので、万が一事故があったら、命はない。
| ベースを斜めにして吊り下げる | ドームスリットから搬入 | 斜めのベースを水平に戻す | ゆっくり降ろしていく |
 |
 |
 |
 |
アーバンは優れたクレーン操縦士である。35年前の古いクレーンは扱いにくいはずだが、非常にソフトにタッチダウンできた。これは簡単そうに見えるが、クレーンの操縦を熟知していなければできない技だ。
クレーンの操縦は丁寧かつ慎重である。
最新式のクレーンはコンピュータ制御で、振りや止めのタイミングを自動的に調整してくれるが、アーバンのクレーンは極めて原始的である。
それを自由に操るアーバンという男は、たいしたやつだ。
30年ぐらい昔の機械だという
今回もあちこち故障した部分を直しながらの操縦であった |
 |
しかし、待ち時間では冗談ばかり言っている。たいていは下ネタ。一同大いに笑う。
以後、アーバンによって大笑いすること度々。
9月13日(水曜日)
一日中風強し。夜は雪。この時期の雪はサザーランドでも十年に一回あるかなしかというものらしい。このように風が強くてはクレーン作業はできない。
水準器にてベースの取り付け状況を測定。傾きを補正しつつ、航空便の荷物を待つ。昼買い物。掃除道具、ティッシュペーパー、などを購入。ビールは一カン45円程度。ジュースが60円なので、ビールの方が安い。
荷物が税関で引っかかっているとのことで、通関した物だけでもサザーランドまで運んでくれるよう頼む。
夜8時~9時に到着予定。この荷物をひたすら待つが、トラックは天文台まで到着せず。
サザーランドに帰る道中、吹雪。
この日、一日の仕事時間を決めた。午前中は8時半から午後一時まで、午後一時から二時までが昼の休憩時間、午後二時から七時までが午後の仕事。
以後、特別なことがない限り、この時間割で組み立て作業を進める。
機械的な組み立てが終わり調整段階に入ったら夜の仕事時間になるので、そのときは作業時間割を夜型に変更する予定。
9月14日(木曜日)
日本側7名、SAAO側6名。
昨日の雪が残っている。早朝到着したとのこと。直ちに荷降ろし。
| 雪の望遠鏡サイト |
 |
クレーンが故障。水関係の配管に亀裂。どうも凍り付いて破損したらしい。天文台の技術スタッフが修理してくれるという。
この故障はクレーンの操作には支障はないが、ケープタウンなで帰る道中はもたないとのこと。この故障が直らない限り、アーバンは仕事が済んでも帰れない。
制御関係の荷物と、西村製作所の作業着、消耗品の類が届いたので、整理しながらドーム内に搬入。
コンピュータのネットワーク関係をセットアップ。IPアドレスは5個配布された。
僕のパソコンのネットワーク環境は、モデムがあっても、RANがないことに気づく。
ネットワークコンピュータのネットワークカード(関氏の)を借りて設定を行うが西村から送ってきたドライバが完全ではなく、うまくインストールできない。
結局、名大の佐藤氏に電話でネットワークカードを購入してもらうよう要請。直ちに送ってもらうことにした。
メールは長田さんのパソコンや望遠鏡制御用のパソコンで、telnetを使って読む。ネットワークカードが来るまでしばらく不便な状況が続く。
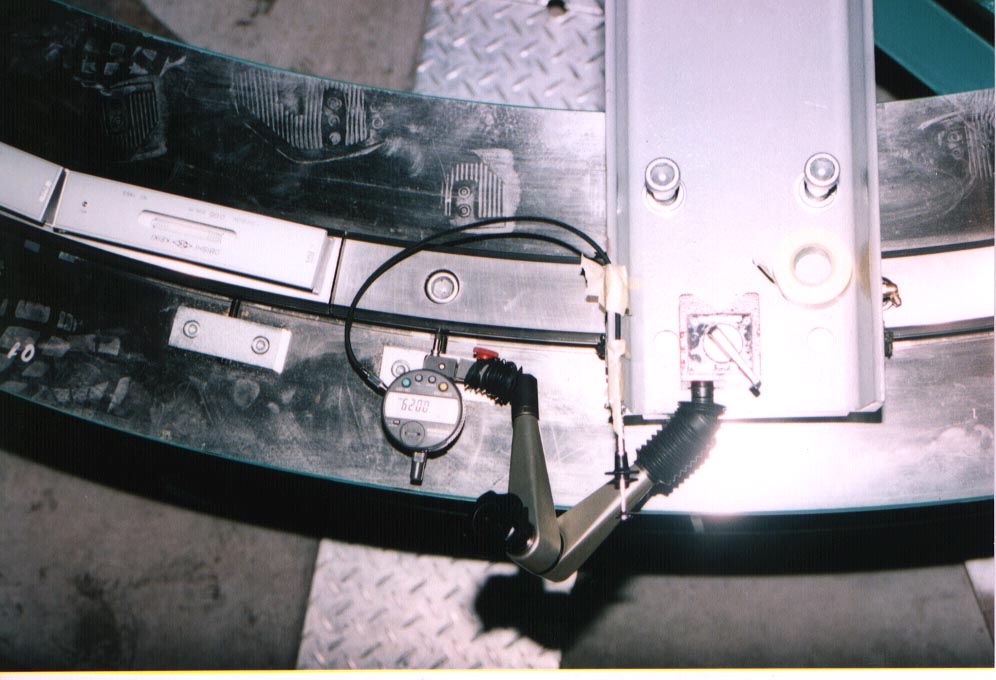
Rガイドのブロックの上にトランシットを載せて一周したとき、水準器のデータとよく整合することを発見。
トランシットの水準器はXY両軸同時に測れ、且つ4秒と分解能も高い。しかも安定するまでの時間が短いので、泡式水準器より使いやすい。
問題なのは、水平の絶対値がわからないことである。
| トランシットを使った水平出し | 水準器を使った水平出し |
 |
 |
ここで、Rガイドのレール上面とブロックを走らせた時のデータとどちらが真の値か論争。Rガイド上面では、つなぎ目で明らかな段差がある。
大きいところで40μm程度。この段差を無視してしまえば、水準器とトランシットの値はよく整合する。結論は翌日に持ち越し。
| Rガイド継ぎ目の段差を測る |
 |
朝は寒かったが、昼から暖かくなる。
夜、帰るとき、ウサギがたくさん車の前を横断。そういえば、今夜は十五夜である。ウ
サギをひきたくないのでゆっくり走る。
9月15日(金曜日)
日本側7名、
朝天候悪い。SAAOへ上がっていくと吹雪状態。すぐに天候回復。イアン・グラスさんがヒーターを2機持ってきてくれた。
水準器でRガイドの上面をみる。入り口すぐ右が高いのでレベリングブロックを下げ、ボルトを締める。
このとき、50μm下げたことをダイヤルゲージで確認。水準器で水平を読む。解析は昼食後にまわす。
芯円度の測定までで、昼食。
| Rガイドの真円度を測定する |
 |
午前の水準器の値を解析した結果、ほとんど効果のないことが判明。午後から再び50μm下げて、水準器で測りなおす。
この間、芯円度の解析結果がでて、サイド方向のシムを入れなおす。
| シムを入れる場所をきれいにする | 新たなシムを置く | 円周方向にもシムを入れ直す |
 |
 |
 |
こうして、いくつかの作業を行った後、再び水準器によって計りなおしたところ、±40μm以内に入っているが、p-pで60μmの誤差があり、補正したと思われる方向とは異なる動きをしているる。
この状態でターンテーブルを載せるか否か、栗田、関、河合の三者で論争となる。
栗田君の意見は、水準器では正しくレールの水平を見ていないのではないか、というものである。
栗田君の意見にも一理あるが、僕は完全に捕らえきってはいないものの、おおよその状態はつかめていると考えている。
関氏は僕と同意見だ。関氏はこの状態でターンテーブルを載せても差し支えないと判断しているが、僕は曖昧さを残したまま先に進むはよくないと考え、絶対的な水準値からの誤差を正確に測る方法を提案した。
それは、水準器の底面にシムをはさんで、曲線の量子化をはかり、絶対的な高さを尺取虫の要領で計るという方法である。この測定は明日実施することでこの日の論議は閉じた。
9月16日(土曜日)
名古屋4名、西村3名、SAAO1名
午前一番でRガイドの水平を見る。昨日のうち合わせ通り、水準器にシムを挟んで60点の傾斜を計る。Rガイドの継ぎ目で大きな段のある場所が2箇所ある。この測定の結果は予想に反して思わしくないものだった。
昨夜、僕はそれまでの水準器のデータを見なおして、その意味を考えた。その結果、ベースとドームの床からアンカーを出している6箇所を拘束していることによって問題が起きているのではないかという疑いをもった。
もし、これは熱による膨張があれば、6ヶ所固定したことによって予期せぬ不可解な挙動となる可能性がたかい。
水準器で水平を測っていたときは、いずれも不規則な熱源があった。
レベリングブロックの補正前ではヒーターの送風で手前側が暖められていた。補正後は左側が直射日光によって暖められていた。
両方とも、暖められていた部分が40μmから60μm高くなっている。これが直接熱源による膨張によるものであることは確認できなかったが、その可能性も十分ありうる。
もし、今回の測定が、過熱による膨張の結果を見ているとするならば、このまま6点をアンカーに固定するのは危険である。
この考えをホテルの朝食のときに話す。この考えに専務も賛成した。
世界の大型望遠鏡は、床と望遠鏡架台を固定しない方法が主流であることや、南アフリカ天文台の地域に地震が発生した記録がない非常に安定した土地である。
従って、今回の我々の望遠鏡もベースと床のアンカーを固定しないことにした。
一度下駄をはいた水準器で測定し、熱源の影響を確認してから、拘束のボルトを全て緩める。拘束場所6点の傾斜が4箇所変化する。
そのご、トランシットと水準器をレールブロックに載せ60点を測定。
レールの溝を主に考えると、Rガイドの上面に明らかな誤差が生じる。この段をレールブロックで走っても段差は感じないし、ダイヤルゲージでR溝を測定すると段は見えない。
このことから、水準器による測定を止めて、Rガイドのブロックの上にトランシットを乗せて、60点の傾きを調べる。
その結果、14日に入れたシムの分だけ高いことがわかったので、入れたシムを取り除き、改めてトランシットで水平を見る。
以上の状態(拘束点開放、後で入れたシムを削除)での水平の値はP-P40μm以内になっている。この結果により、Rガイドの水平出しは完了したとみなした。
次はターンテーブルを載せる。ベースよりさらに重い。2.5トンもある。
ターンテーブルはRガイドにぶつけるとRガイドを壊す恐れがある。その点、アーバンは非常に滑らかに降ろしてくれたので、Rガイドにダメージはない。
| ベース同様、斜めにして吊り下げる | ドームスリットから搬入 | 指示をクレーン操縦士に伝える柿本氏と関氏 |
 |
 |
 |
| チェンブロックを引いてテーブルを水平に戻す | 一端水平にしたのち、ゆっくり下げていく | Rガイドのねじ穴位置と
ターンテーブルの穴位置を合わせる |
 |
 |
 |
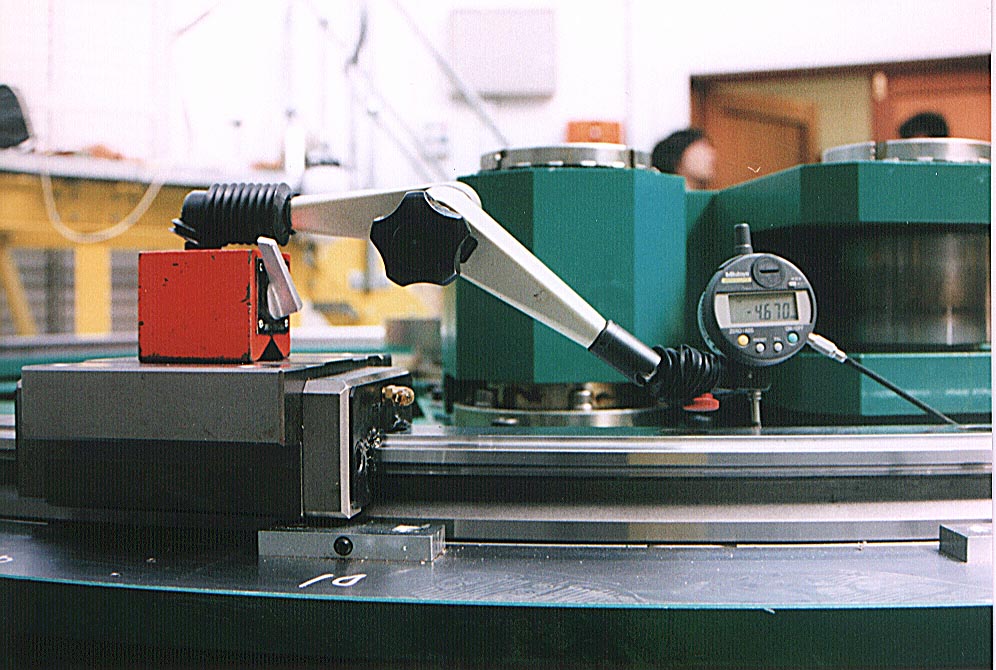
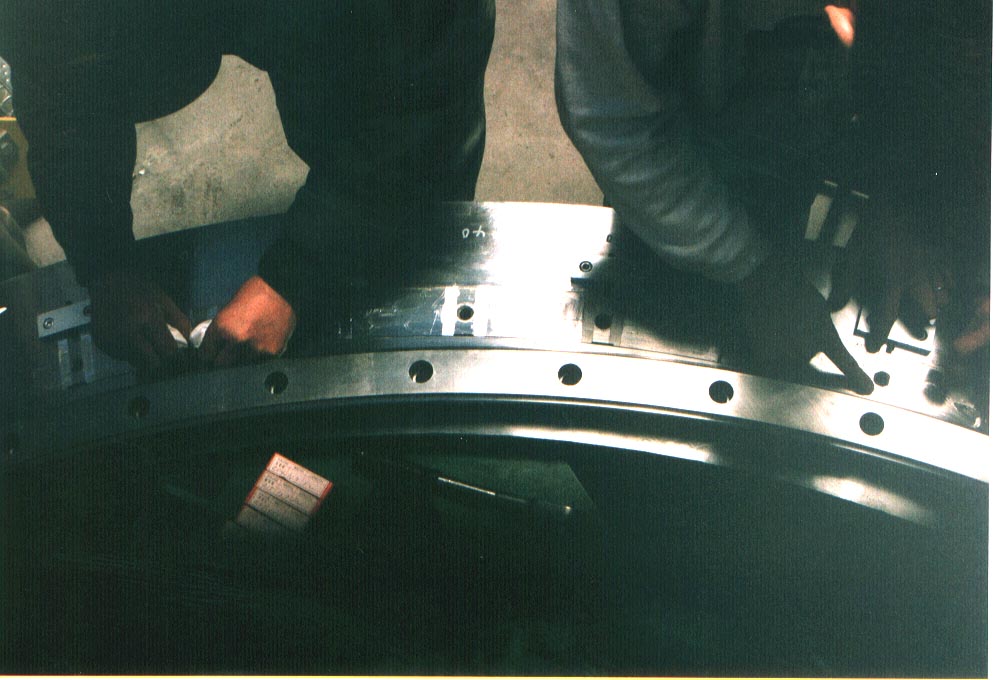
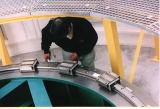
ターンテーブルの中心出しでは、中央のロータリエンコーダ取り付け部分であらかたの位置を出しておき、フリクション部分にダイヤルゲージを当てて、偏芯を見る。
| ターンテーブルの偏芯を見る |
 |
この時の測定は、日本での組立て時より悪い数字だった。横から押すのに対して、ターンテーブルとRガイドのブロックとの摩擦が大きいため、スムーズに動いてくれないようだ。ハンマーで周囲を叩くと多少は歪が開放される。
しかし、何周も回って偏芯を測ると、同じ場所での再現性がなく、非常に微妙な値を示す。
このようなことはある程度予想できたので、多少バラツキがあっても、それ以上調整は困難と考え、方位軸の組立てをこの時点で切り上げた。この部分の最終的な調整は、エンコーダを取り付けるときに最終的な微調整を行なうことになる。
この状態で、一同、とりあえず乾杯!、最初の難関は突破したものと思う。
| 方位軸ターンテーブルが無事組みあがった事を祝い乾杯! |
 |
9月17日(日曜日)
専務をケープタウンまで送っていった。
ターンテーブルはトランシットを乗せたまま回転させて、水準がゼロであることを確認(栗田)した。フォークの上面でも水平を確認している。トランシットの感度は4秒なので、十分な値である。この値は後に鏡筒をのせたときも変わらなかった。
この間、西村の2名と名大の2名+アーバンで、ターンテーブルの中心出し、フォーク、センターピースの組み立てを完了。
| センターピース組み立て | ターンテーブルにグレーティングを敷く | センターピースのバランスをとる |
 |
 |
 |
我々は道中ペールへ立ち寄り、ゴージャスな昼食をとる。ギターとヴァイオリンの二重奏による音楽会付のランチであった。
よく知られた民謡や音楽をアレンジしたアットホームな演奏で好感が持てた。ヴァイオリンは低音がきれいな奏者であった。
ギター奏者が音楽をコントロールしているようで、非常にきれのよい伴奏を行っていた。
多分、相当の時間をかけて、コンビをつくってきたに違いない。
月に一回ぐらいコンサートを開いているとのこと。生活の中に生の音楽が息づいているのはいいなあと思った。
コンサートのあと、初老の紳士が僕に音楽会の感想を求めてきたが、十分答えられなかった。もし自由に英会話ができたなら、さぞかし会話がはずんだことだろうに。とても残念でならない。
夜のドライブは神経を使う。N1では対向車のヘッドライトがまぶしく、前方の視界が狭くなる。マイキスフォンテーンからはR354となる。
R354はサザーランドまで舗装されていて、それ以後はダートだ。天文台まではダートの道を15kmほど東にはいる。この道は夜間大型の動物が道路に飛び出してくるので要注意とのこと。
アーバンが我々を気遣って、ダートは80km以上は危険だと教えてくれた。彼は、ダートで幾人かの友人が死ぬのを見たそうだ。みなちょっとしたアクシデントで車のコントロールを失っているとのこと。
R354で初めて登ってきたときは、マイキスフォンテーンからの山肌にオレンジ色の花がたくさん咲いていた。
この花は福寿草のように、花が先に咲いてから葉っぱがでるようで、非常に不思議な光景だ。地獄か天国か、地層がむき出しの山肌も十分見なれない光景であるのに、さらにこの花が別世界であることを強調しているかのようだ。
9月18日(月曜日)
日本側6名、SAAO2名
センターピースの軸(高度軸)と方位軸を直交させる。これは一度日本でできているので、とりあえず組立てて、直交精度を測定する。ここで5秒以内に追い込む。
メールを送る環境整備を進める。
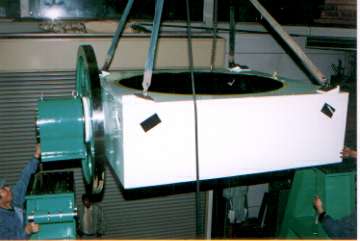
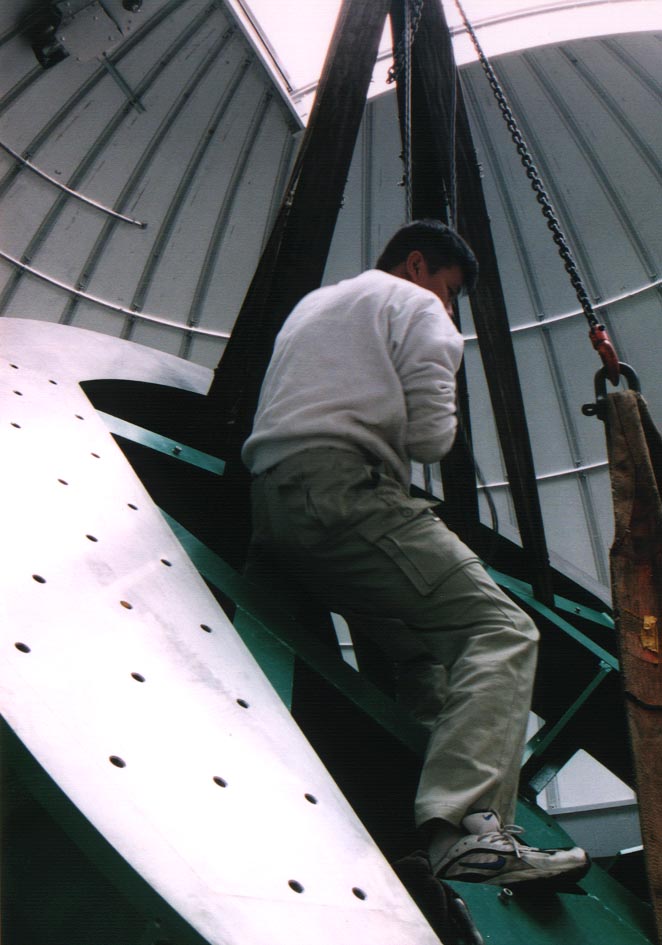
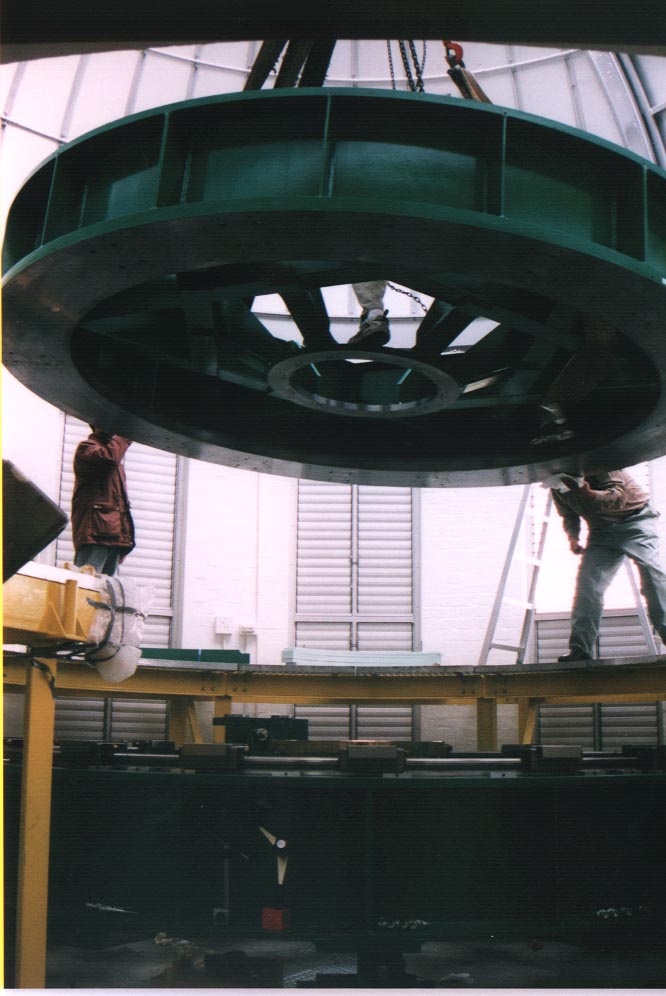
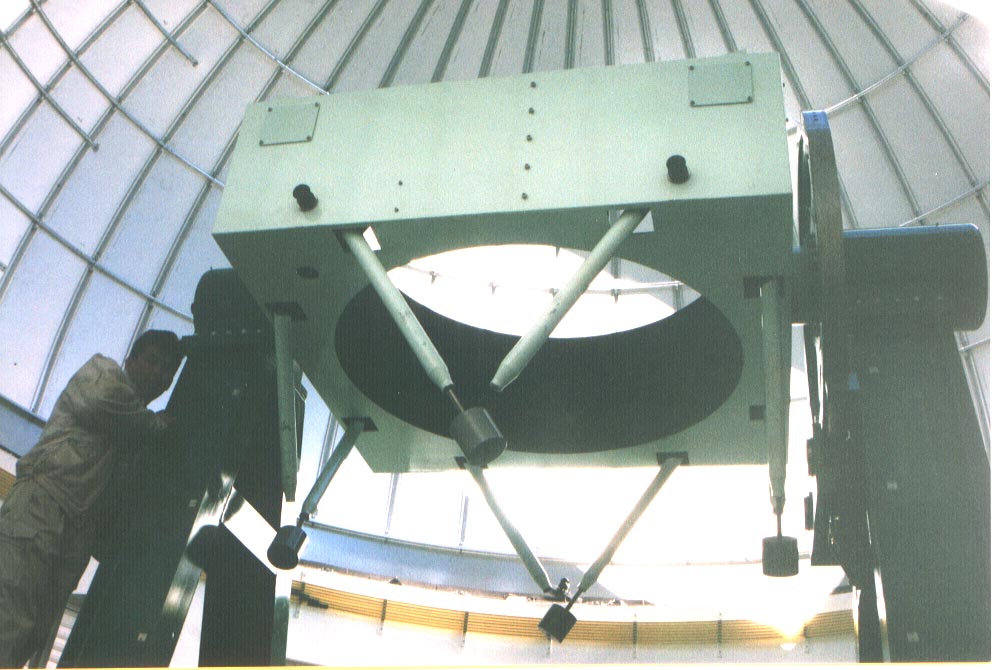
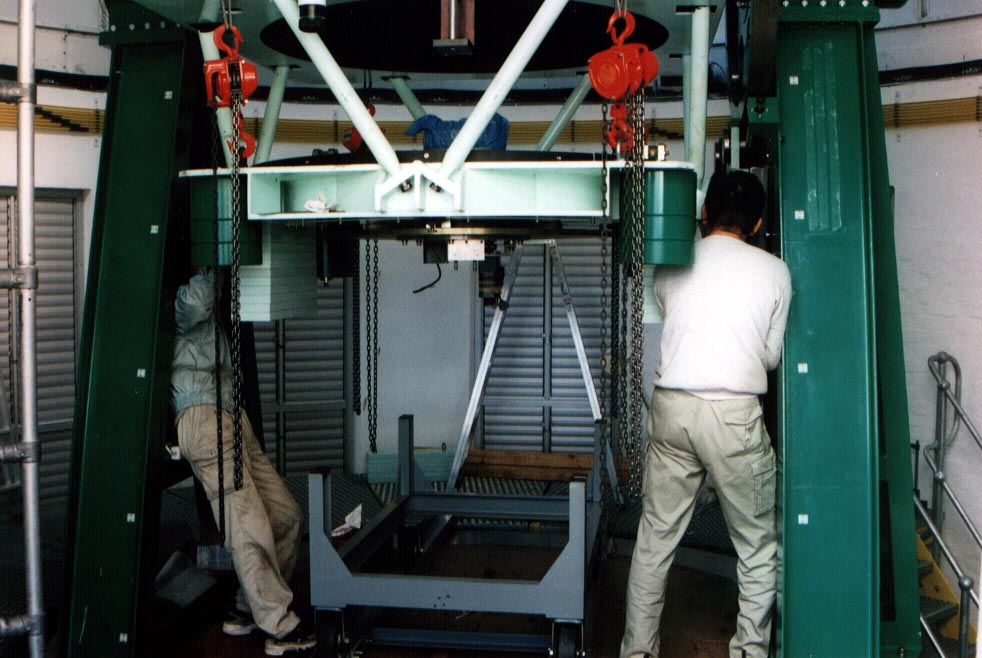
主鏡セルと鏡筒トラスを組み立てる。センターピースの四点にチェンブロックを4個架け、主鏡セルをこれで吊り上げる。主鏡セルは主鏡交換用ガイドトレーラーに乗せる。
センターピースにチェンブロックを
かけて主鏡セル組立ての準備 | 主鏡セルを組立てるための台車 |
クレーンで主鏡セルをつる |
 |
 |
 |
| ドーム内に搬入 | チェンブロックで主鏡セルを吊り上げる | 主鏡セルとセンターピースを固定する |
 |
 |
 |
この方法は、主鏡を交換する最、同じ作業をすることになるので、非常に参考になった。
今日は何人も見学者が訪れた。名古屋の望遠鏡は、ここではちょっとした人気者である。
今日、ホテルを引き払って、天文台のゲストハウスに移動。室内にヒーターがあるので、多少まともな生活ができそうだ。
ドームにオーディオセットが持ち込まれた。AIWAのコンポである。3CDのセットだが、いかにも安物といった感じ。しかし、音楽が聞けるのはうれしい。
専務の差し入れである「ワイン」は甘口の赤であったが、非常に薫り高く、腰のあるよいものだった。
ゲストハウスの風呂はホテルのよりも使いよさそうだ。しかし、洗面所とトイレと風呂が一緒なのは困りものである。
9月19日(火曜日)
名古屋大学4名、西村2名、アーバン
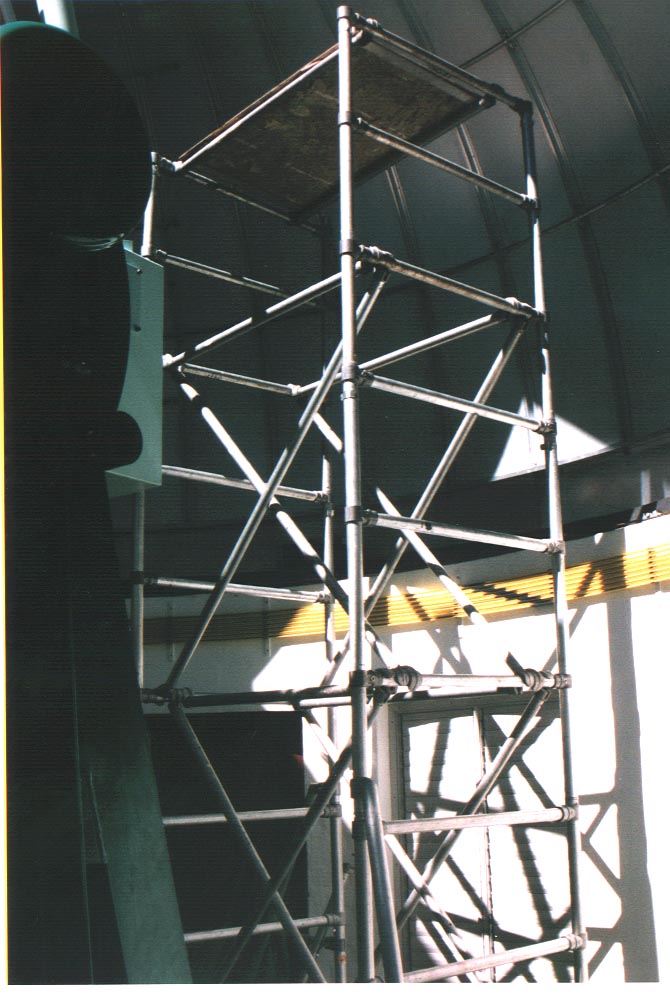
今日はトップリングを入れる。足場を組んだが、最初に組み始めたものはドームの組み立て業者が置いて行った物であった。一旦組み始めたが、SAAOの足場があるというので、そちらに変更する。
最初にトラス部分を組立てる
| トラス搬入の準備 | クレーンでトラスをつる | ドーム内に搬入 |
トラスを固定 | 組みあがったトラス |
 |
 |
 |
 |
 |
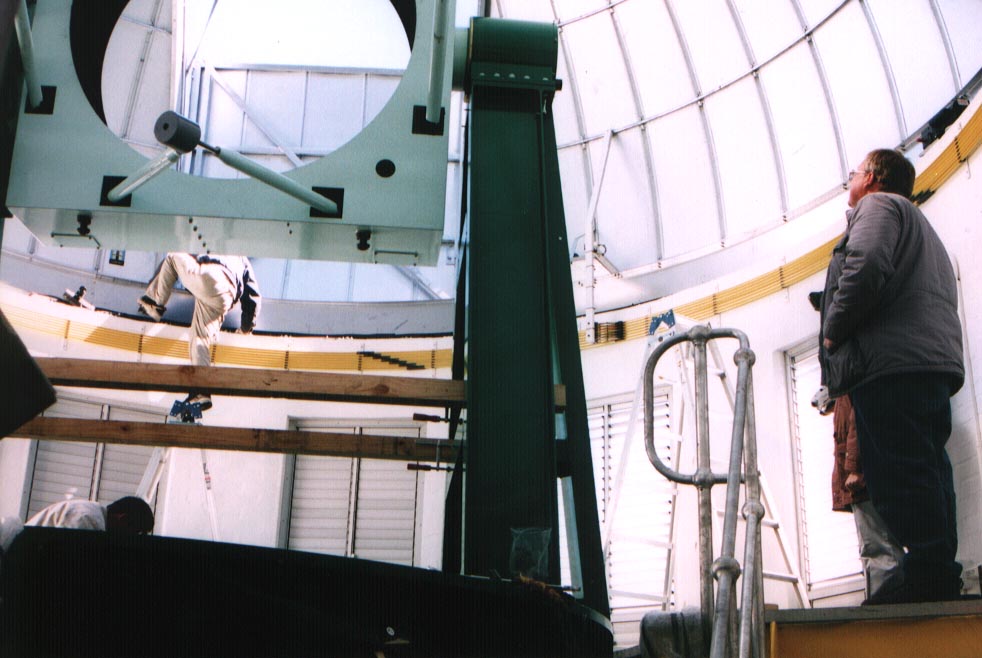
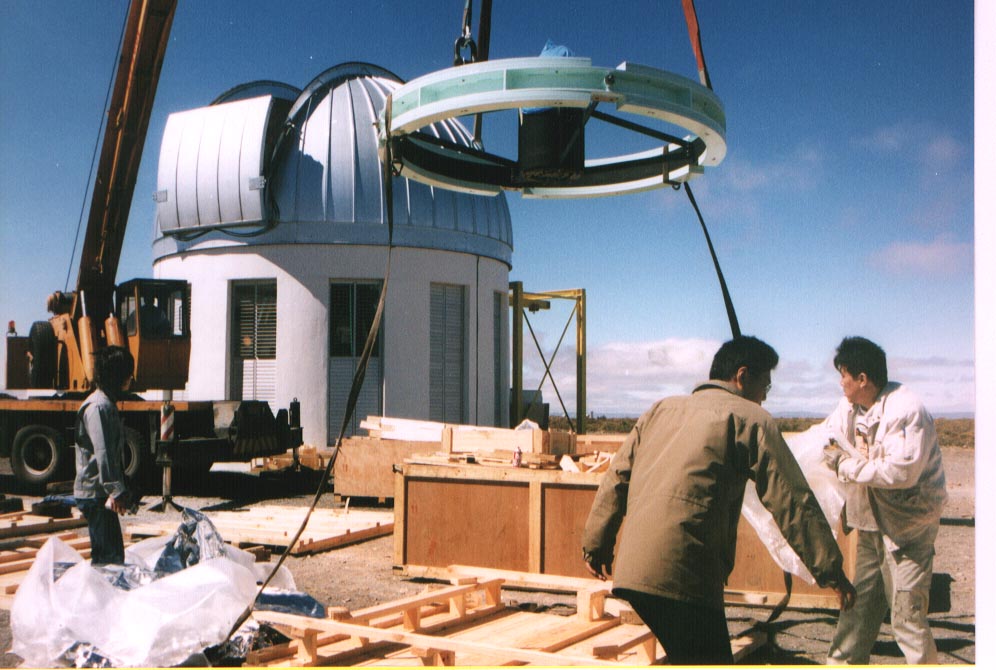
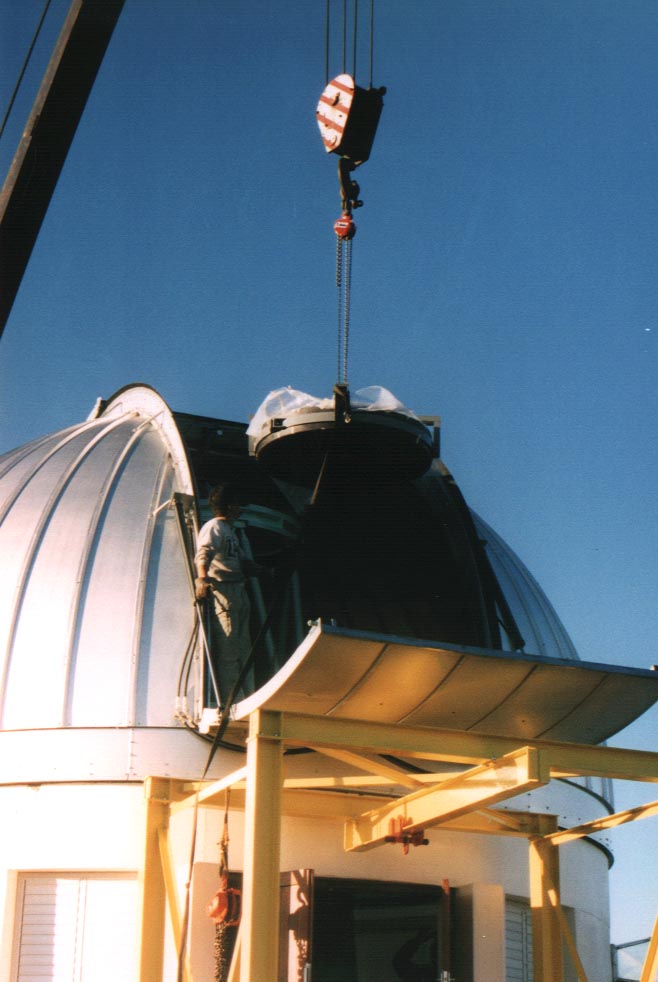
次に、トップリングの搬入である。
| トップリング搬入の準備 | クレーンでトップリングをつる | ドーム内に搬入 |
トップリングを固定 | 組みあがった鏡筒をドームの外から眺める |
 |
 |
 |
 |
 |
SAAOの足場はアルミ製で軽い。組み立て方がわからなかったので、SAAOの技術者に聞く。以外に小さく、安定度があやしい。
主鏡の梱包を解いて、ピットの前に移動させる。クレーンを使った最後の仕事として、大型の梱包材を一箇所に集め、整理した。
アーバンの仕事はこれで全部終わり(の予定だった)。重量物を取り扱う仕事において、玉がけ作業者とクレーン操縦者、指示をだす人の、呼吸が一致していることが何よりも大事。
今回の作業では、この点が、非常にうまくいった。それは、アーバンの腕前や人柄によるところが大きい。アーバンに感謝する。
ネットワークの状況は極めて悪い。
日本と南アフリカの時差は7時間です。朝9時ころ、こちらの読みたい時間は南アフリカのオフィスも一斉にネットワークを使うので重くなる。
同時に、日本も4時ころとなり、結構ネットワークが混んでいる。そのような事情から、ほとんどつながらない状態になり、十分に情報を送れない。SSHの設定がufpにされていないので、telnetしか使えない。
早くこの状態を脱しないと、こちらから十分な情報を送ることができず、現在進行中の他の仕事に指示が出せない。これは僕にとっては深刻な問題だ。
9月20日(水曜日)
日本側6名。SAAO8名
鏡筒の調整のため、ローテータの下部に平面鏡を取り付け、ベースの下中央からオートコリメータで変化をみる。
ターンテーブルを180°回転した場合とローテータを180°回転した場合と、それぞれ4~5″の変化しかない。
京都で組み立てたときはこの値が大きく狂っていて、センターピースとトラスのつなぎ目にシムをいれた。今回は、シムを入れない状態でぴたりと合ってしまった。
一同不思議がるが、測定結果が良いことと後でもシムは入れられるので、このまま作業を先に進めることとした。
主鏡セルやセンターピースが溶接構造になっていて、船旅で船倉に放置されていた1ヶ月間の温度変化で、エージングが進んだと考えれば都合が良い。
最終的にもこの直行精度は計ることにして、先にすすむこととした。
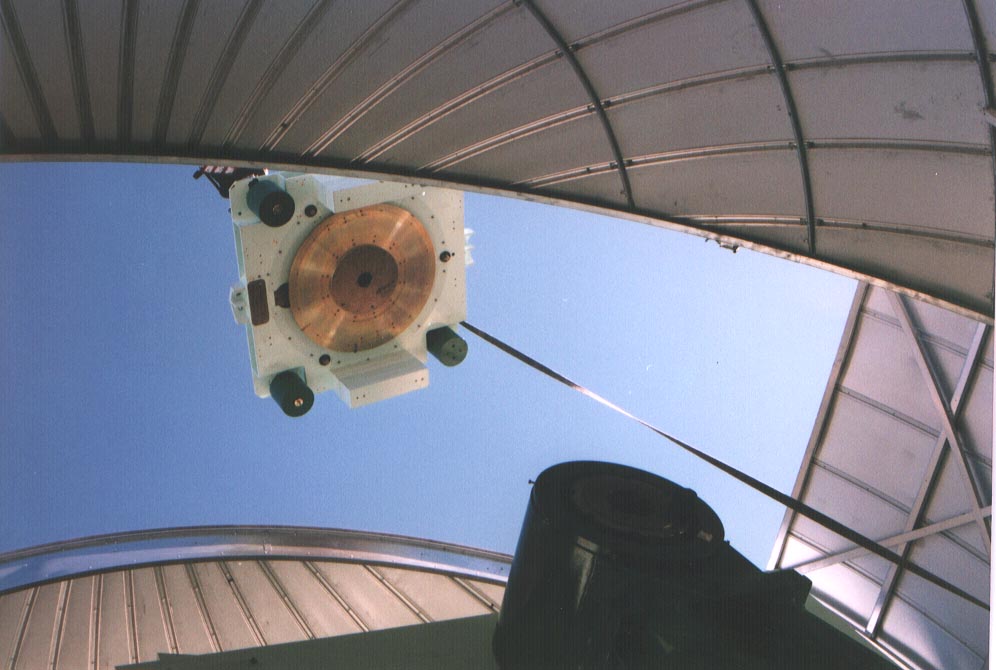
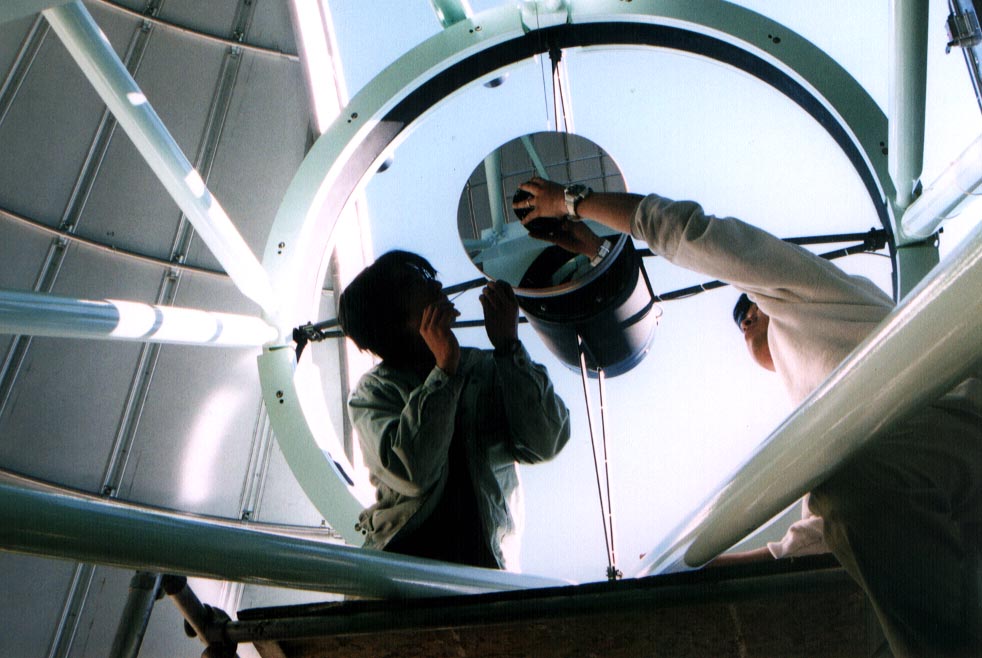
主鏡の搬入
最後に、主鏡をピットから入れようとしたが、ピットの開口幅がわずかに狭く、日本で用意してきた道具や方法が使えない。これが判明したのが3時半ころ。
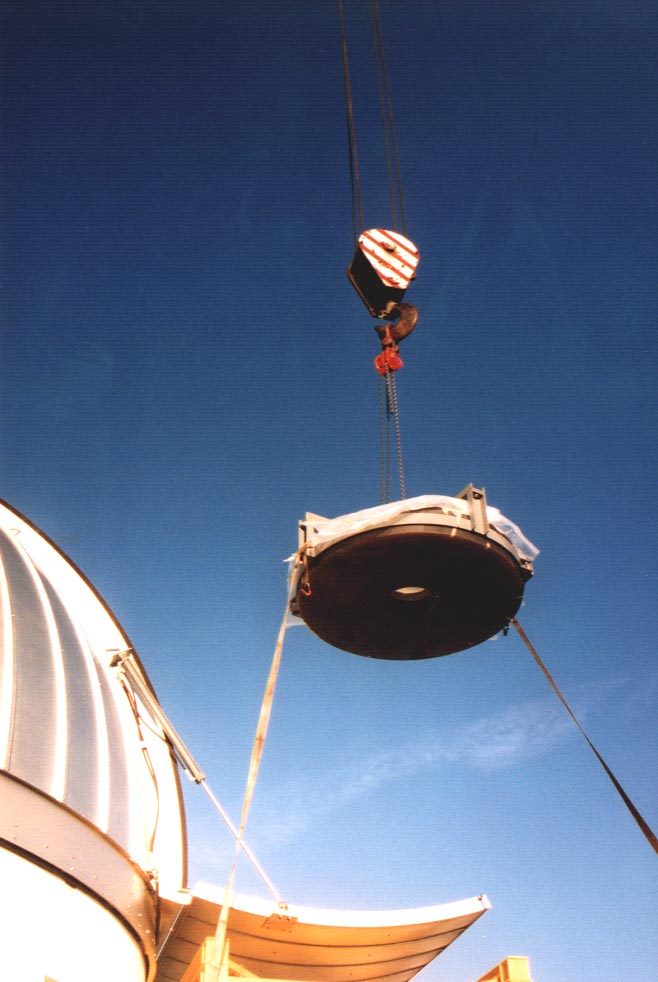
| いよいよ主鏡の梱包を解く | クレーンで主鏡を収納した箱ごと移動 | ドームの主鏡交換ピットに搬入 |
ピットのチェンブロックで吊り直す | しかしここで主鏡セルが扉を通らない事が判明 |
 |
 |
 |
 |
 |
今回、最大のピンチ。
別の方法を考えたが決定打がない。4通りほどの方法があるが、いずれも利点と欠点を持っている。1時間ほど議論したが結論はつかない。
最終的には、アーバンの腕前を信頼し、クレーンで主鏡を直接持ち上げ、主鏡セルに載せることにした。
この方法の利点は持ち上げる回数が一回で済むと言うことである。さらに、主鏡をセルに取り付けた後の作業が簡単で安全なことだ。
欠点としては、主鏡を直接10m以上の高さまで吊り下げ、主鏡セルのセンター金具にぴったりと収めなくてはならない。
この作業は主鏡という望遠鏡にとって最も重要な部品を10mの高さまで上げることの精神的な恐怖感である。
他の案は、主鏡を2回持ち上げなくてはならないことと、主鏡の真上にさびたチャネルや2トンのチェンブロックを持ってくることで、取り外しに事故が心配である。
このほかにも、ころで主鏡の箱ごと移動するなどの、やりにくい作業がある。
このようなことから、クレーンで吊り上げて、ドームのスリットから直接主鏡を入れた。
| 主鏡吊り金具を主鏡に取り付ける | クレーンで主鏡を吊る |
 |
 |
| クレーンで持ち上げた状態の主鏡 | 吊り金具で持ち上げたときに傷ついた主鏡 |
 |
 |
 |
 |
アーバンは見事期待に応えてくれて、非常にスムーズに運んだ。
主鏡がセルに無事納まると、その場に居合わせた人々から大きな拍手が送られた。このような仕事で拍手が沸くのは非常に光栄である。
天文台の職員が固唾をのんでこの作業を見ていたので、アーバンの仕事ぶりは極めて印象に残ったことだろう。
アーバンはSAAOに良い待遇で迎え入れられる可能性を見出したに違いない。
これは、これまでのアーバンの腕を見て彼を信じた我々」の判断が正しかったことと、アーバンが馬鹿話をしながら我々との会話を深め、この仕事のクルーとしての、人間的信頼関係を意識的に作ってくれたことなど、彼の力によるところ大である。
この日の夕食は期せずして乾杯となった。
主鏡が入ったことで、前半の山場は超えたと言って良い。
2~3日前から天候が安定していて、夜の星空はすばらしいの一言である。ハワイのマウナケアより良いように見える。
小マゼランの上の球状星団、コールサック、タランチュラ星雲、南のかんむり座、南十字星、ケンタウリαなど・・・日本では見えない星座や天体を双眼鏡でこころゆくまでみ
る。
ここにきて、ノートパソコンが時々ダウン。強制的に終了させる。
9月21日(木曜日)
長田、河合、加藤、栗田、関、柿本
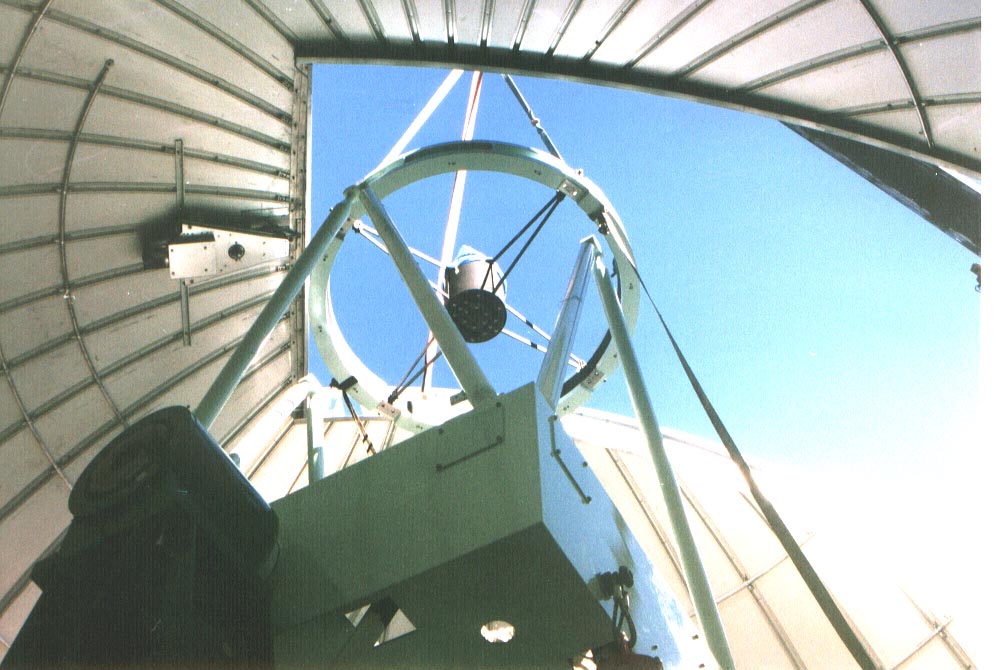
この日は、副鏡部分の組み立てと取り付け。先日組んだ足場が何とか役に立つ。
その後、鏡筒のバランスをとる。
ノートパソコンがいよいよピンチ。ディスクスキャンが始まって、とまらなくなってしまった。バッドセクタが80ぐらいで70%終了、この時点で昼食となったので、一旦ディスクスキャンを止める。
午後再開、遅々として進まず。
組みたて作業の方は順調に進み、方位軸エンコーダ取り付け部分の準備作業まで行った。
今日アーバンとお別れ。クレーンの修理も終わり、悠然と引き上げていった。
ピットの扉のロックがかからないので直す。これで戸締りも安心。
夕食後もドームに戻ってディスクスキャンを続けるが、76%でバッドセクタ300を超える。11時を過ぎたのでそのまま放置し、宿舎に帰る。
9月22日(金曜日)
長田、河合、加藤、栗田、関、柿本
今日の朝は、いきなり栗田君の鹿騒動で騒々しく始まる。
どうも、夜間に鹿(スプリングボック)が部屋に入り込み、机の下に糞をしていったようだ。鹿も変なところに入り込んでしまって、さぞや困ったことだろう。
ここの鹿はハントしてはいけない事になっているそうだが、事故など(自動車と衝突)して死んでしまった場合には、喜んで食べるとのこと。イギリス人が、ボックの肉は6時間以上野菜と一緒に煮込むと、とてもうまい・・・と言っていた。
今日は風が強い。入り口の扉がばたばたと音を立てている。ドームのスリットを空けてあるので、風圧の関係から、扉をゆする力が加わるようだ。
僕のノートパソコンはたいした役にもたたず、半分壊れてしまい、残念。ディスクスキャンも午前中にはようやく終わり、され再立ち上げ・・・となったら、SAFEモードでしか動かない。この状態ではネットワークカードも取り付かず、USBマウスも応答しない。画面の調整もできず、今は600*480で16色オンリーというありさまだ。
さて、本題の組みたて作業であるが、方位軸のロータリーエンコーダを取り付けている。どうしても取り付け金具が楕円になってしまい、最大50μmの誤差(読み取り面の隙間、回転軸からのずれ)がある。
午後から本格的な調整で、±10μm以内に入った。
ここで、リサージュを見る。オシロスコープをX-Yにセットし、エンコーダの出力を観察する。円の形が変形したり、大きさが小さくなるような場所は、エンコーダの面が汚れているので、これをふき取る。
原点通過もOK。
方位軸のフリクション面を清掃・研磨、フリクション駆動の軸合わせ。
9月23日(土曜日)
名大 長田、加藤、栗田、河合
西村 関、柿本
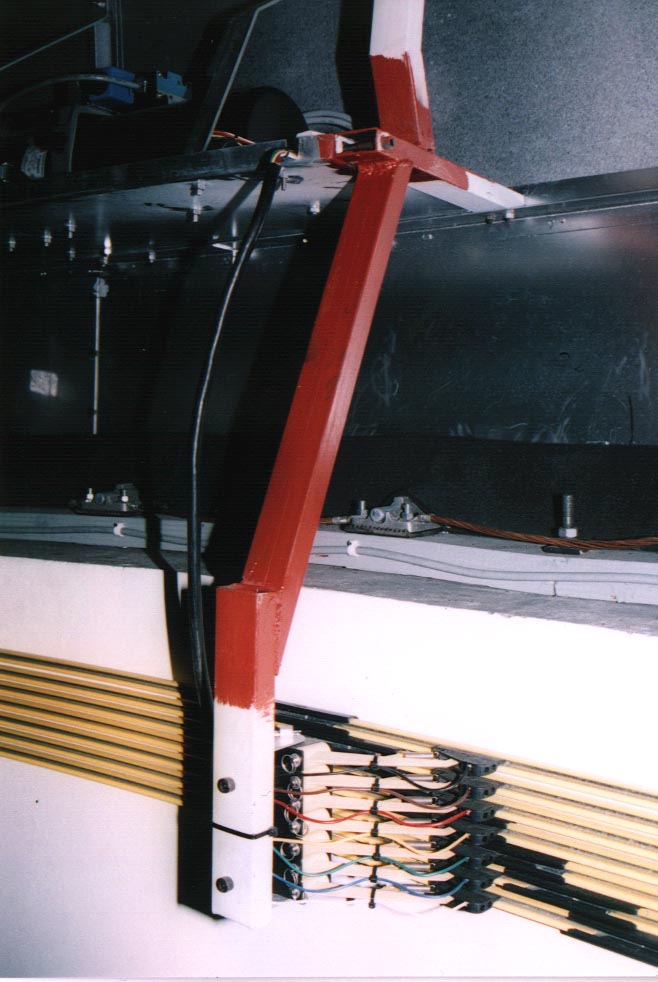
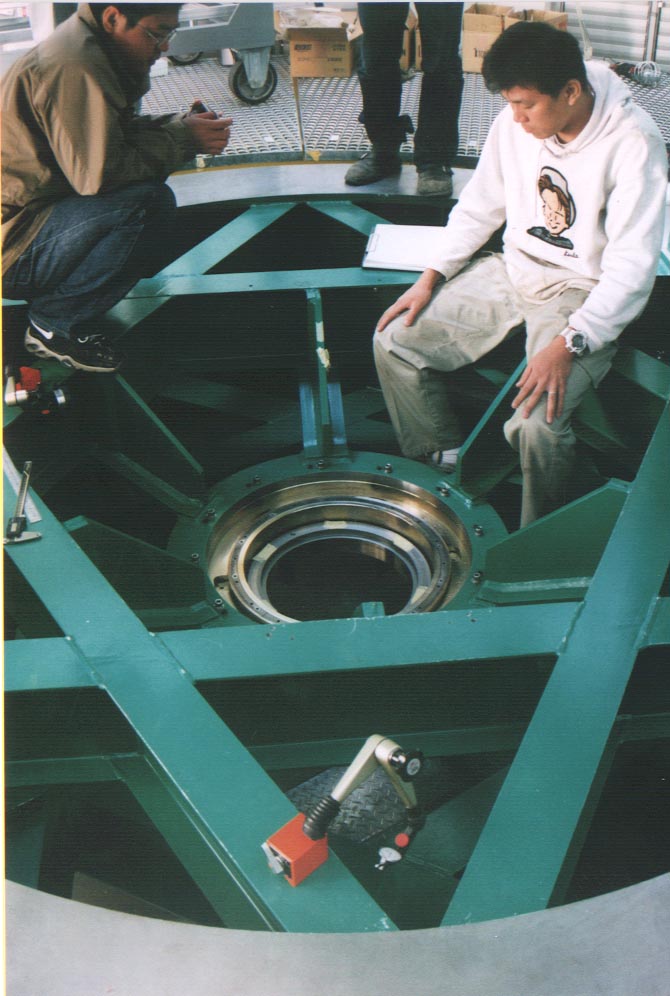
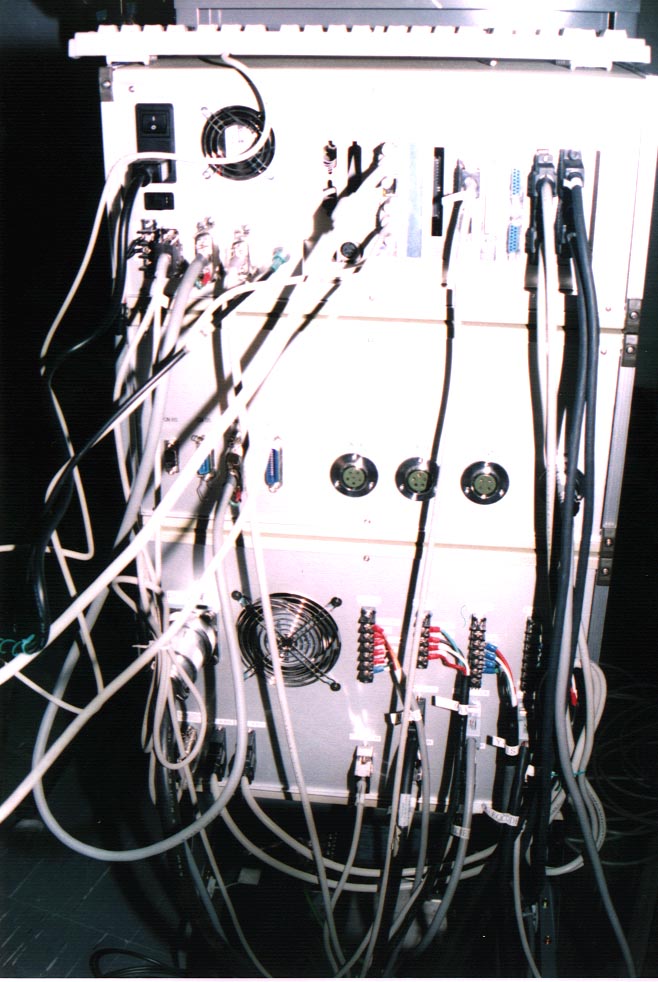
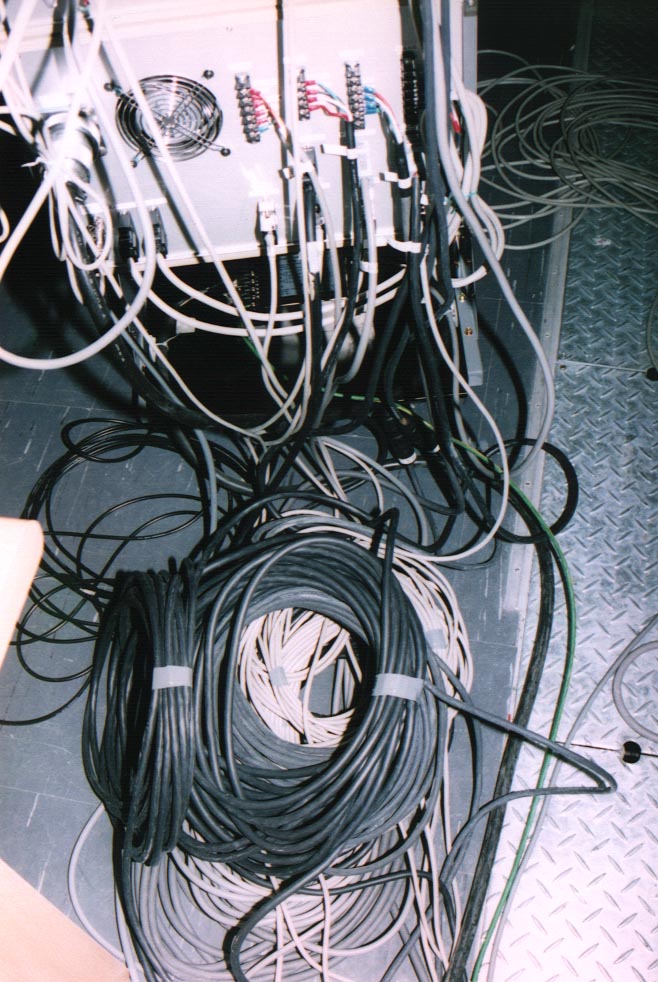
配線の準備に取りかかる。
ピットの蓋をあけ、電源関係の配線がどうなっているかを調べる。
何本かの線(モータ、エンコーダ、リミットスイッチが各3軸分と副鏡駆動分、鏡筒補正エンコーダ、緊急停止スイッチ、ドーム制御など)全部で15本のケーブルをピット内をはわせる。
| 制御用コンピュータの裏側 | 配線用ピットから制御用コンピュータに配線 |
 |
 |
観光客が大勢望遠鏡の見学にやってきた。しばし作業中断。
この日は早めに切り上げる。
僕のパソコンは相変わらずSafeモードでしか動かない。このままでは役に立ちそうにない。
9月24日(日曜日)
今日は完全休養日。
早朝強い雨あり。
午後見学者があり、望遠鏡のドームに来てみると、ドーム内に水が入っている。
大急ぎで掃除機で吸引し、ティッシュペーパーで水分をふき取る。ピット内も一部浸水。大雨の降らないサザーランドでは、まともな防水加工ができないらしい。
シャッター窓(ガラリのようなもので、ブラインドのように開閉できる)が8カ所付けてあり、シーリングは外の方に施してある。このシャッターの構造を考えると、シーリングは内部から行うべきであった。
早めに我々の手で内部からシーリングをやり直し、外部に水抜きの穴をあけなくてはならないだろう。
夜、1mと60cmの赤道儀を見せてもらった。1mは我々のドームより遙かに大きなしっかりしたドームで、一階には仮眠室や研究室がある。
この日はあいにく霧になり、観測をそうそうにうち切ったようだ。
このあと、このグループの人たちと話をしたり、ビリヤードを楽しんだりした。
9月25日(月曜日)
名大 長田、加藤、栗田、河合
西村 関、柿本
元気な加藤君が元気がなくなっています。
食事の関係で、どうやら、みんな体調が悪くなっているようです。
今日は配線が全部つながり、望遠鏡が一応動くようになりました。
まだ細かいところにおかしな部分があるので、調整を進めながら直して行くことになります。
今日、完全に僕のパソコンが壊れてしまいました。HDDが認識されないようになり、全く使えない状況になってしまいました。この文章を書いているのも制御用のパソコンでかいています。残念ですが、これ以上手の打ちようがありません。
9月26日(火曜日)
名大 長田、加藤、栗田、河合
西村 関、柿本
朝から穏やかな天気。小春日和とでもいうか・・・
作業内容:
1、GPSエラー
画面に一行文字を表示させたらNG、これをもとに戻す事でOK
2、方位エラーの測定
エラー小、京都で作った補正が入っていた
3、ルーバーの水漏れ対策を協議
内側に堤を設け、漏れてきた水を外に出すドレン穴をあける
ルーバーの壊れている個所は以下の通り
1、観測室とドームの通路南側、一番下の一枚
2、通路からドームに入ったすぐの北東、右下3枚、左下1枚
横殴りの嵐のときにルーバーの雨漏りがどのようになるかを確認する必要がある。もし、ルーバーの隙間から水が入ってくるようなら外側に雨戸のようなものをつける必要がある。
露結の問題:
UKIRTでは露結時バケツ一杯の水が望遠鏡から滴り落ちる
主鏡のカセグレン穴を通して水が観測装置に流れ込まないよう、鏡筒を傾ける、という操作を行なって、対応しているとの事。
こちらでの対応策を考える必要あり
湿度データを取る、あるいは常時モニターしていて、露結しそうだったら観測を中止してドームを閉める事にすれば良い。
鏡筒とドームトロリーとの干渉:
鏡筒とドームのトロリーが干渉するので、鏡筒を25°以上傾けられない。制御の関係上ドームと望遠鏡の方位とが完全に一致して動く保証はないので、何らかの対策を施す必要がある。
20°付近まで観測する可能性があるので、この問題はなんとか解決したい。
温度計:
温度・湿度・気圧のモジュールを設置する場所を決める必要がある。
一つはドーム内、主鏡付近、もう一つはドーム外側
9月27日(水)
朝快晴、めずらしく微風。ワゴンの左前輪タイヤの空気圧が減っているので、エニーの作業場で空気を入れてもらう。
朝から方位軸の補正テーブル用データ取り。
監視用テレビカメラ設置:
ツールパネル固定:
インパクトドリル、ブッシュ、ねじ、コンクリートドリルなどを借りてきて、床や壁のコンクリートに穴をあけ、固定する。
10時ころ2回停電あり、補正テーブル取り直しになる。
午後から光軸合わせ
- 光軸望遠鏡をローテータに取り付ける
- ローテータと光軸望遠鏡との並行を出す
- 副鏡に平面鏡を取り付ける。平面鏡はあらかじめ平行を出しておく
- 副鏡の軸を光軸望遠鏡と合わせる
- 副鏡の中心にレチクルを置き、光軸望遠鏡とレチクルの中心を合わせる。このとき、スパイダーを調整する
- センターセクションに糸を張り、光軸望遠鏡のレチクルと合わせる
- 副鏡から帰ってきた糸の像が重なるように副鏡の傾きを合わせる
- 主鏡カバーを外し、主鏡から帰ってきた像とこれまでの像が重なるよう、主鏡の傾きを合わせる
以上で光軸調整は終了、この調整方法によって大まかに光軸は合っている。
これ以上の細かい調整はハルトマンテストの解析結果を見ながら微調整する
ドーム制御の不具合:
ドーム制御ができなかったのはRS232-Cケーブルのクロスとストレート
の違いが原因であった。ストレートにする事で解決。
ドーム原点を付ける必要がある。光センサーによる原点を設置する事とする。
排材の再利用:
関と河合で梱包排材の木片やくぎを再利用して棚や長椅子などを作る。
棚は浄水機やポット、食品を置く台となり、ちょっとしたカフェバーのようになった。
長椅子は、疲れたときの一服用で、その上で寝たり、休んだりできる。
| 廃材利用の長椅子 |
 |
ここまでの作業で一段落ついた。光軸調整が大まかにできたので、眼視によるファーストライトを実施することとなった。
明日は完全休養日として、栗田君の見送りをかねて、ケープタウンへ行くことにする。
日本食品の購入や日本食レストランでの食事などを予定する。
ファーストライト:
初めての星の導入で、座標が北天のままとなっていたので、変更。
1、外惑星 天王星、海王星、瞑王星、
2、球状星団 NGC362、NGC104
冥王星まで見れるとは思わなかった。導入も実にスムーズであった。
球状星団の美しさは言葉に出す事かなわず!!、NGC362は素晴らしかった。
が、NGC104はもっと素晴らしかった。ただただ感激のみ。無数のほしぼしがちりばめられ、まるで宝石箱のようだった。
9月28日(木)
朝から晴れ。8:00、ケープタウンへ向け出発。パールのKWVで昼食。
領事館:
領事館で開所式への領事の出席を確認する。
ケープタウンの日本人の実状を聞く。20人ぐらいか。
日本人はヨハネスブルグに200人ほど、商社(水産関係)が中心、日本人学校はヨハネスブルグにあるが、生徒は4人ほど。日本の教育を希望する家族は2家族のみとのこと。あとは現地の学校へ通っている。
日本食材の買い出し:
加藤君は長期滞在するので、米、炊飯器、食器、インスタント食品を大量に買いつける。
インスタント味噌汁、インスタントラーメン、レトルトカレーなど。
夕食は日本食レストランの「寿」、予約必要。
本格的な日本食が食べられる。日本の物価と比較すると決して高価ではないが、現地の価格からみると非常に高価。
お寿司はねたも新鮮でおいしい。
宿舎はSAAO。お風呂の水ぬるい。シャワーは水だったらしい。
9月29日(金曜日)
晴れ。早朝ケープタウン空港へ栗田君を送りに行く。空港で朝食。
ウォーターフロントで買い物:
水、ジュース、など。
昼食はゴーママゴー、回転すし屋。ここのラーメンは変な味だ。すしは行ける。
帰り道、途中で関さんに運転を代わってもらう。
夕食はラーメンとご飯。日本食でみんな元気を取り戻す。
9月30日(土曜日)
くもり、風強し。
朝から補正テーブル用のデータ取り。今日がデイサイクルの最後か?
今後の仕事を整理すると、
1、T-POINTによる望遠鏡制御の解析と修正
2、ハルトマンパターンによる光学系の解析と修正
3、温度計モジュールの設置
4、方位軸エンコーダ補正テーブルの評価と修正
5、ホストコンピュータによるマン=マシンインターフェースの整備
この日の夕食は、台長直々の南アフリカ式バーベキュー「ブライ」でした。
ここから本格的にナイトサイクルになる。
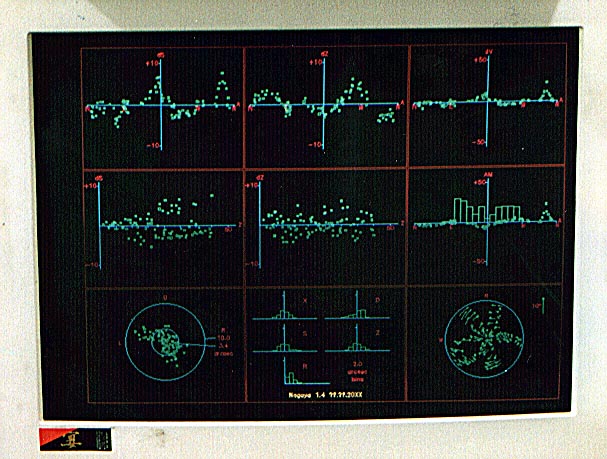
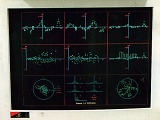
T-POINTによる望遠鏡解析
19:20 最初に接眼鏡によって50個の恒星を入れ、補正値を探る
21:20 CCDを付け、T-POINTを繰り返す。CCDモニター画面上
の中央に星像がくるように補正し、補正値を読み取っていく。
シーイングやや不良、風強く、星像の揺らぎあり
解析の結果、方位の原点データが1000秒以上ずれていることがわかった。
| T-POINTによる望遠鏡の解析 |
 |
すでに日付は変わり、午前4時を回っている。次からはナイトサイクルである。
10月1日(日)
11:00 起床。晴天。
12:00 ドームの試験、原点出しが動作不良、一回転のパルス数がおかしい。
13:00 昼食
14:00 ハルトマン板を取り付ける。
| トップリングにとりつけたハルトマン板 | ハルトマン板をつけた鏡筒、カセグレン焦点にはCCD |
 |
 |
・ドームとエンコーダとの関係
ドームのエンコーダ 60 P/rev
ドームのスプロケット数 12 T
ドーム一周のスプロケット数 1149 T
1スプロケット当たりのパルス数 5 P
ドーム一周の総パルス数 5745 P
ドーム一周のパルス数が足らない。どうもスプロケットが脱線しているようだ
ドーム制御の不良個所を整理し、山下氏にメールを送る。
5:15 夕食
7:20 ドームの動作はコンソールから別個に行ないつつ、ハルトマンテストを実施する。
8:00 ルーバー全開、望遠鏡の温度が外気になじむまで待つ。
10:00 ハルトマンパターンを取り始める。
・ハルトマンパターンの取り方
CCDのモニター映像をビデオに収録、
ビデオ画像をキャプチャーボードによってBMPデータとして取り込む。
30~60画面を重ねあわせ、パターンの重心を求めてハルトマン定数
を算出する。画面の切り方はいろいろ考えられる。
10:20 初めてご飯を炊く。水を多くいれすぎて軟飯になってしまった。
それでも、夜食としておおいに満足。以後、夜食はラーメンライス
1:00 霧出現、ドームを閉じる。
霧が発生すると、望遠鏡は露結し、ずぶぬれ状態となる。
機構部分は良いとしても、鏡に水滴が付けば乾燥後も埃が残るので鏡は暴露したくない。
湿度センサーによって常時監視し、露結する前にドームを閉じるようにするひつようがある。
本日はこれで終わり。他のドームも皆スリットを閉じて、下山した。
10月2日(月曜日)
ナイトパターンでの仕事のやり方は以下の通りである。
午後2時~6時の明るい間は、夜の作業の準備、あるいは、明るいうちにしか
できないことを集中的に行なう。
夕食後、観測準備(ルーバー、スリット、シャッターを開け、原点復帰を行なう)
夜食は11時~12時ころ。条件が良ければ午前4時~5時まで観測。
14:00 昨夜のハルトマンパターンを解析した結果、3点支持部分が強く出ていると判断。
ストッパが働いていたのでバランスウェイトが正常に機能していない。
ストッパを外し、バランスウェイトを調整していく。
昨夜のHCは0.36秒
・ドーム動作不調の原因
ドームエンコーダのAB相が逆だった。これを直す。
スプロケット脱線は、スプロケットの幅を狭くする事によって解決。
・周辺の整理
コントローラーの裏側をきれいに整理し、机とコントローラーの位置を合わせる。
スナックスタンド(棚)と長台によって、お茶や夜食などの準備をするスペースをつくる。
・UPSの問題
望遠鏡用のUPSが必要(この時はSIRIUS用に準備したものを拝借していた)
新たにSRIUS用に大きいものを準備してもらう事にした。
19:00 台長の訪問を受ける。
19:45 ピーコックを入れて、ハルトマンパターンを取る。
HC=0.411、先日より悪い。
ハルトマンパターンを取り直す===3回
主鏡裏側のバランスウェイト調整、
4回目、ハルトマンパターンが反転?HC=0.31
5回目、バランスウェイトを大きく動かしてみたら、主鏡がずれてしまう。
これを直して、再び測定、下部に大きな凸、HC=0.40
相変わらず、ドームは同期(方位軸と)運転ができていない。
画像処理の段階で、16bit(BMP)データしかできなかったのは、
設定画面でbit指定できることが判明、解決。
6回目、天頂付近に来た星(アンカー)を入れてデータを取る。
バランスウェイトとハルトマン解析パターンとが一致しない。
サンプル数が少なく、データの信頼性に欠ける??
0:15 サンプル数を多くしてデータを取り直す。500の映像きり出し?
HC=0.31
高度を変えて、データを取り直す。高度角50°、東北東
2:20 解析中、土星、木星をCCDで捉える。
HC=2.1と極端に悪くなった===主鏡が浮いている!!
4:00 バランスウェイトを引いて、補正量を小さくする。
こま収差16秒という信じられない値、原因不明
本日これにて終了。ハルトマンパターンの解析プログラム作者に質問することに。
10月3日(火曜日)
14:00 サザーランドへ買い物。
アラルダイト、木工ボンド、ジュース、ビール、ワイン他
15:00 1.9m望遠鏡を見学、岡山天文台と同じ機種である。ドームが大きく
一階には実験室や居室もある。一階の一室をSIRIUS用に貸してくれるとのこと。
16:00 ドームのトロリー部分を改良する。トロリーの腕が望遠鏡の鏡筒と干渉し、
25°までしか下げられない。
設計通り20°まで観測できるようにしたいので、この改造に踏み切る。
(関、柿本)
その間、河合は
接着剤(アラルダイト)の硬化時間を確認する。
温度計の測定点と中継器の置き場所について案を作る
19:10 夕食
20:00 T-POINTを実施。目標数100.SKYは柿本氏
月明かりが目立つようになってきた。
・T-POITNによる望遠鏡解析の手順
1、対象の星を導入した後、ローテータのみ回転させて、望遠鏡光軸の芯を求める
2、モニター画面に光軸の芯の位置がわかるようにマークする
3、次々に星を導入し、微調整によってモニターのマーク位置に星像を重ねる
4、微調整した分のデータを解析側のコンピュータに送る
5、3と4を繰り返し、望遠鏡の可動範囲をほぼカバーできるようにプロット
していく
6、解析側に集計したデータによって評価する。
注意事項:シーイングが悪いときは星像が安定せず、モニターのマークと一致させる
事が困難となる。したがって、この部分での誤差が含まれる事を忘れないように!
解析の結果、やはり主鏡が動いたようだ。バランスウェイトを更に退くが再び動く事を確認。
1:50 3回目のT-POINT、バランスウェイトは75mm。
やはり主鏡が動いている。バランスウェイトがほとんど効いていない情況なのに
主鏡が浮いてしまうのは不可解である。
3:20 横吊りバンドが主鏡を持ち上げている可能性があると関氏が指摘。
関氏の指摘は的中していた。横吊りベルトがずり落ちないように、足を付けてあるのだが、
これが1cmほど短く、機能していなかったようだ。
臨時に足を持ち上げるようにして、20個の星でT-POINTを実施。
まずますの値に落ち着いたので、主鏡が浮く原因は横吊りベルトであると断定する。
明日、ここにしっかりとしたスペーサーを取り付ける事とした。
4:10 100個の星によるT-POINTを実施。
4.28秒
6:00 終了
10月4日(水曜日)
曇りのち晴れ、上空高層雲あり
14:00 コンクリートドリルを借りてきて、必要なものを取り付ける
ホワイトボード
ドーム外の温度湿度気圧測定ユニット
温度計の取り付け 13個所
・温度計の目的は以下の通り
1、鏡筒の温度変化をモニターする
2、主鏡付近及びドーム外側の温度湿度気圧を常時モニターする
・温度計の配置
入力CH番号 種類 取り付け位置 詳細位置
--------------------------------
1 温度 センターセクション
9 温度 主鏡セル
13 温度 主鏡 北
14 温度 下トラス 南
15 温度 下トラス 北
16 温度 上トラス 南上
17 温度 主鏡 南
20 温度 上トラス 北下
21 温度 上トラス 南中
22 温度 上トラス 南下
23 温度 トップリング
25 温度 上トラス 北中
26 温度 上トラス 北上
27 温度 主鏡付近
28 湿度 主鏡付近
29 気圧 主鏡付近
30 温度 ドーム外
31 湿度 ドーム外
32 気圧 ドーム外
17:30 夕食
18:30 温度計の接着、配線
コードバンドを使い切ってしまう。風防などの取り付けは明日
19:30 T-POINT開始
20~30の星で大まかな補正を行なう
観測中、足場の鏡筒をぶつけるあるいは足場を引きずるといった事故
をおこす。幸いにも、望遠鏡にダメージはなし。
この辺がダイレクトモータの良いところだろう。オーバーロードになれば
ドライバーが止まってしまい、機械側に大きな損傷を与えなくて済む。
20:20 100個の星でT-POINT実施、3.5秒。まずまずの結果。
23:00 夜食
23:30 ハルトマンテスト一回目、0.32秒
0:30 ハルトマンテスト二回目、ローテータを90°回して一回目との相関関係
を見るが、良く分からない。
この間、ドームと望遠鏡方位軸とが同期して運転できるようになった。
ハルトマンテストの評価ソフトについて、ソースを調べ、赤外シミュレータと比較するが
違うところは発見できず。
1:15 追尾試験。30分間の追尾によって星像がどれぐらい移動するかを調べる。
結果は十分満足できるものであった。
10月5日(木曜日)
晴れ、半月からやや太いぐらい。
14:00 明るいうちの仕事を進める
1、ルーバーの水漏れ試験
外側からホースで水をかけて内部に漏れてくる情況を見る。
一個所だけ、時間がたつと内部に漏れ出す。
サッシの下側の比較的大きな穴をあけ、溜まった水がスムーズに出るようにする。
2、ペンキ塗り
作業によって塗装が剥げ落ちたところがあるのでそれを補修する。
ベース板、ターンテーブルの上面など、まだ塗装を施してない部分を塗る。
3、ドームロータリー給電部の補修
ドームの真円度が悪く、一個所ドームトロリーで給電できない部分がある。
トロリーの角度を調節して、全ての位置で給電できるように調整する。
4、高度リミットスイッチ取り付け
18:00 夕食
19:00 リミットスイッチの確認
温度計データの取得を試みるが、バラツキ大。ノイズを拾っている
模様。
20:00 100個の星でT-POINT、
23:00 T-POINTによる補正を加え、追尾データを取り直す。
ローテータモータドライバにエラー発生
過電流入力エラー(初めて出る) 原因不明
先に取った追尾データはローテータがきちんと機能していたか不明
なため、信頼性なし。
10月6日(金)
晴れ
14:00 明るいうちに以下の仕事を進める
1、ペンキ塗り
2、掃除、後片付け
3、温度測定回路の確認
雑音の原因は温度計の出力インピーダンスが高く、長い線路にPWM変調の
モータドライバからの輻射が乗っている可能性大。
出力端子と電源+側との間に1MΩを入れてインピーダンスを下げる実験を
行なう。これによりノイズレベル低下する。
挿入前 160mVのAC誘導、50mVのスパイクノイズ
挿入後 2mVのAC誘導、10mVのスパイクノイズ
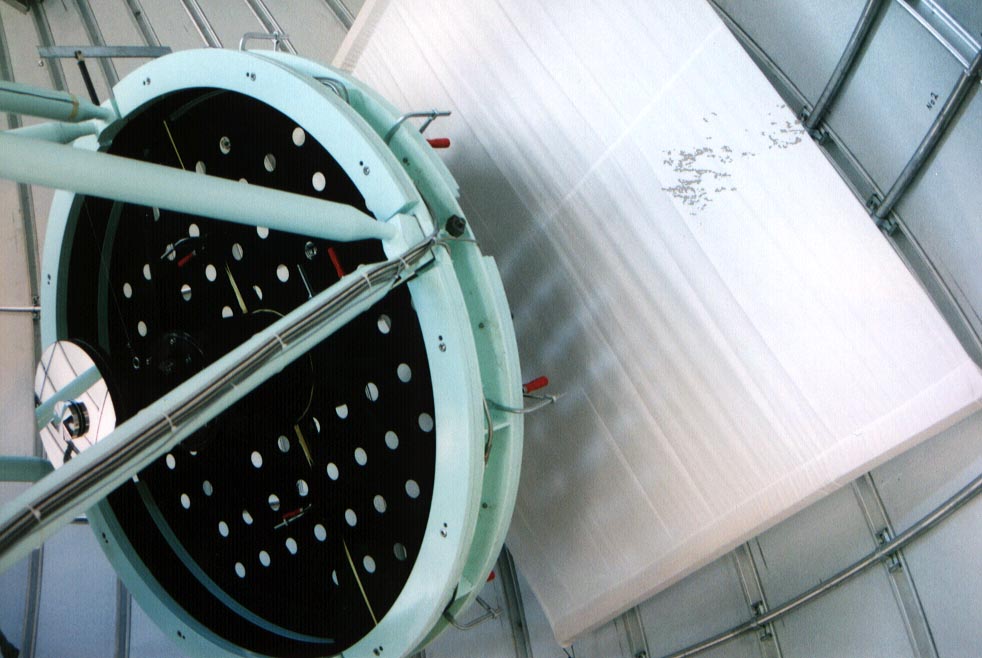
4、フラットフィールド用布取り付け準備
20:00 ハルトマンテスト
高度80°から25°まで、データを取る。HC=0.4秒でほぼ同じ
0:00 T-POINTを実施
10月7日(土)
今日はピート・フーリエご夫妻に案内されて、11月15日宿泊予定のゲストファーム
でブライを楽しむ。
雰囲気、自然など最高!!
23:00 温度計の読み出しデータは、望遠鏡の電源が入っていなければ安定しているので、センサーと変換機との間のケーブルでノイズを拾っている
ことは確実。
かなり厚い雲に覆われているので、星を見る事はせず、方位軸の補正データ
をとるなどの作業を進める。
10月8日(日)
晴れ、上空薄曇り
14:00 温度データの確認、残念ながらデータは使い物にならない。
ノイズが大きく、信頼できる状態ではない。
信号線にアルミフォイルを巻いてノイズが下がるかどうかを確認
思ったほど下がらない。やはり本格的にシールド線などで布線し直さな
いとだめなようだ。
15:00 道具を送り返すための「箱」を準備。
フィールドフラットの布を取りつける。
16:00 皺がよているので、アイロンで伸ばす。アイロン故障。アイロン交換。
17:00 掃除
18:00 夕食
19:20 T-POINT始める。
方位軸の補正データが悪く、T-POINTの結果が思わしくない
22:00 ハルトマンパターンの取得
1:00 追尾試験
上がってくる星と、降りる星を15分追尾、中心が動く
| ドームフラット用の白い布 | 鏡筒とドームの間隔狭く、正しいドームフラットを得る事は困難か |
 |
 |
10月9日(月曜日)
晴れ、風強し、風力計が振り切れることも
14:00 主鏡カバー取り付け
ハルトマンパターン取り外し
15:00 バランス調整
16:00 南アフリカ天文台のスタッフに望遠鏡の操作方法を説明する
19:00 主鏡バンドのスペーサー(10mm)をマシンショップに探しに行く
エゴンに作ってもらう
19:30 足場解体
20:00 ドーム内の掃除
風が弱まるまで月などをCCDで見る
21:00 T-POINTデータ取得開始、100個の星を入れる
これまでの解析によって、望遠鏡は非常に安定しており、補正なしでも
17秒以内の精度を持っている。これは驚きに値する。
できる限り市販の部品を使って望遠鏡を作ったらどんな物ができるか、
という挑戦でもあったのだが、結果は素晴らしいものであった。
もちろん、西村製作所の技術が素晴らしかったことが証明された訳だが、
最初の設計方針、コンストラクションを決定したところで、この形に
必然的になったと考えられる。経緯台は、制御の問題さえクリアできれば、
非常に良いものができるという事を我々は証明した。
2:00 風を正面から受けると、鏡筒がかなり振られる。風に対し90°以上
の角度なら全く問題ないので、強風時の観測スケジュールを特別メニュー
にするようなことが必要だと思う。
相変わらず温度データはノイズを拾って、バラツキが大きいが、湿度計
は安定しているので、校正をおこなえば十分信頼できるだろう。
サザーランドでの仕事は教で終了。残念ながらハルトマンテストの評価に
ついての知識が不十分だったため、光軸と主鏡の補正ウェイトの微調整は
不十分なままであったが、この状態でも我々の観測の条件」を満たしている
事から、機械系の調整をこの状態で終了する事とした。
10月10日(火曜日)
快晴、風強し、
いよいよ今日ケープタウンに戻る。